Online Extrinsic Calibration of RGB and ToF Cameras
Date:

Experiment 1
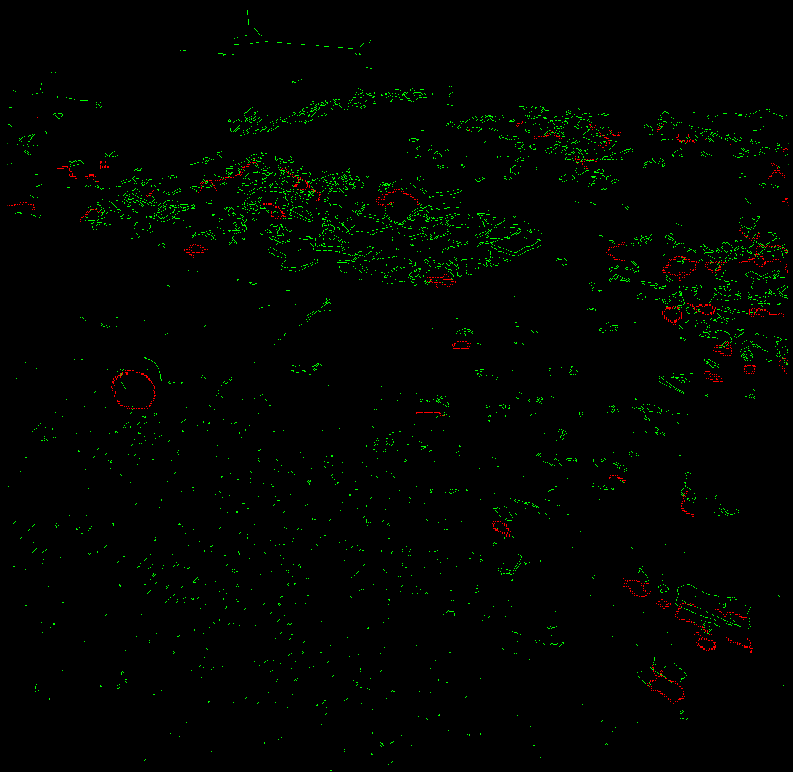
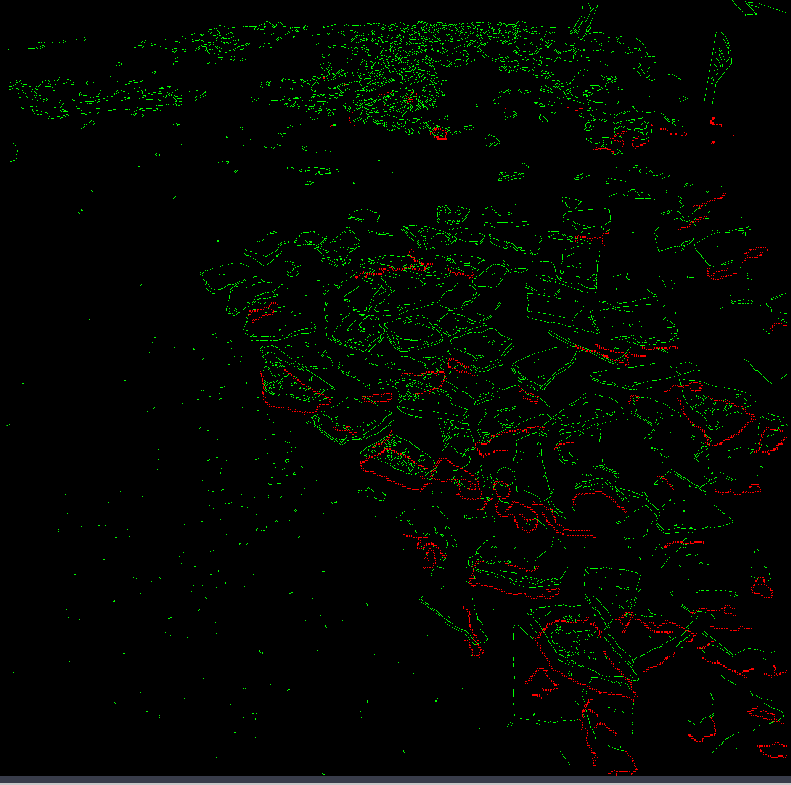
Canny Edge Extraction Results under Initial Calibration Extrinsics
The Canny edge extraction results of the navigation left camera image are displayed in green;
The Canny edge extraction results of the TOF camera image are projected onto the image pixel coordinate system of the navigation left camera through the initial calibration extrinsics and intrinsics and are displayed in red.
The initial extrinsics are calibrated offline.
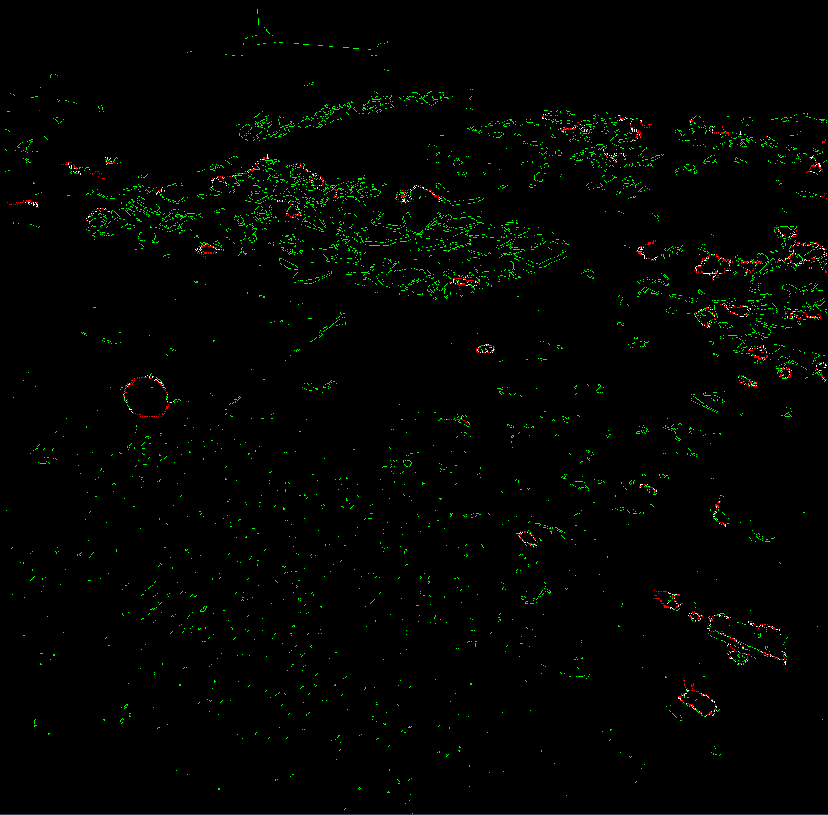
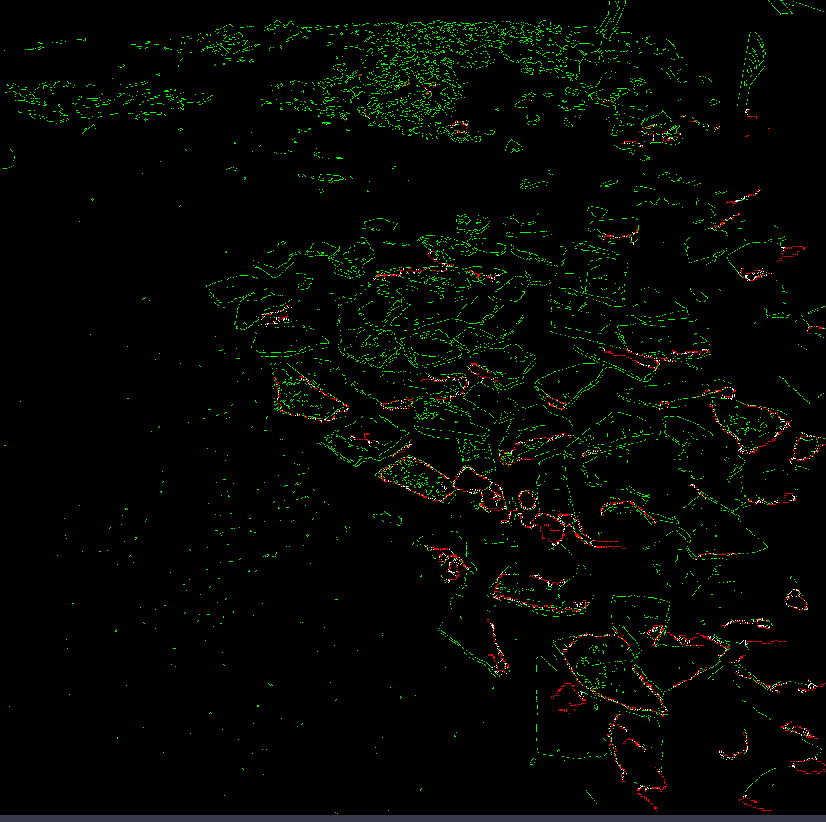
Canny Edge Extraction Results After Extrinsics Optimization Reprojection
The results after reprojection using the optimized extrinsics through nearest neighbor edge point association and navigation camera-TOF camera extrinsics optimization.
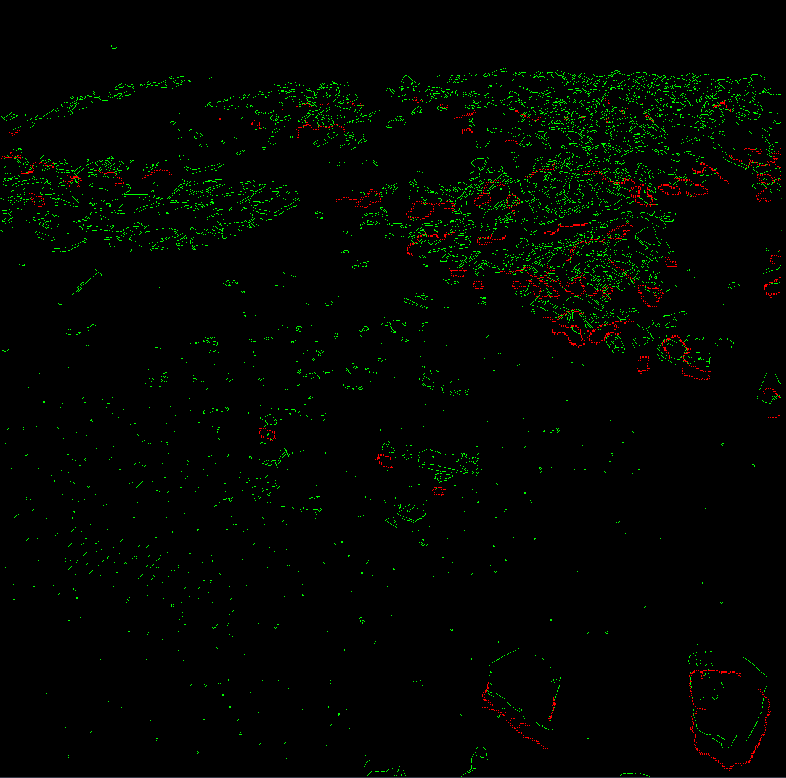
Experiment 2
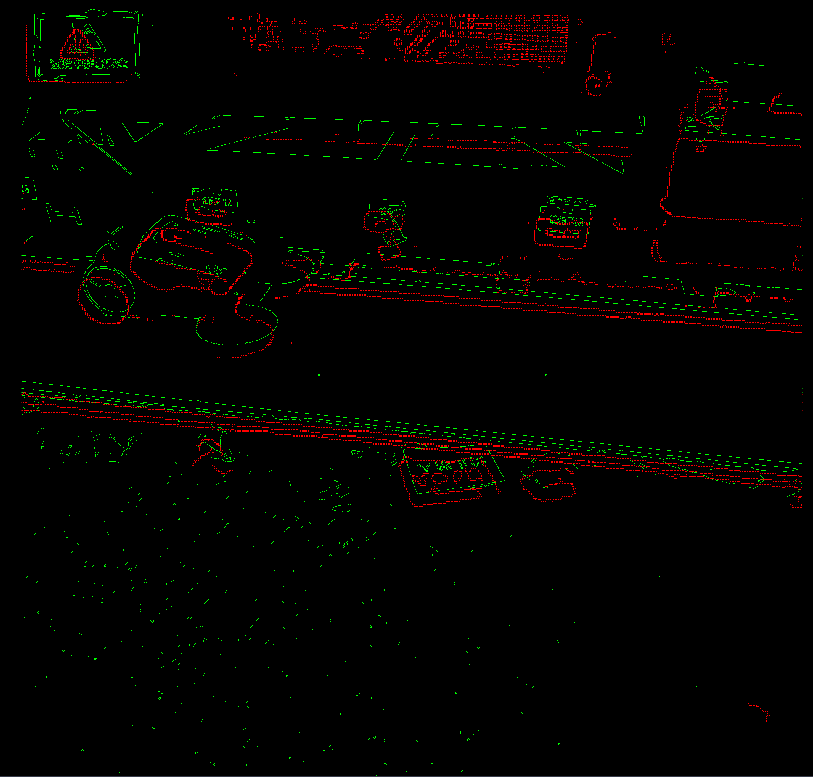
Canny Edge Extraction Results under Initial Calibration Extrinsics
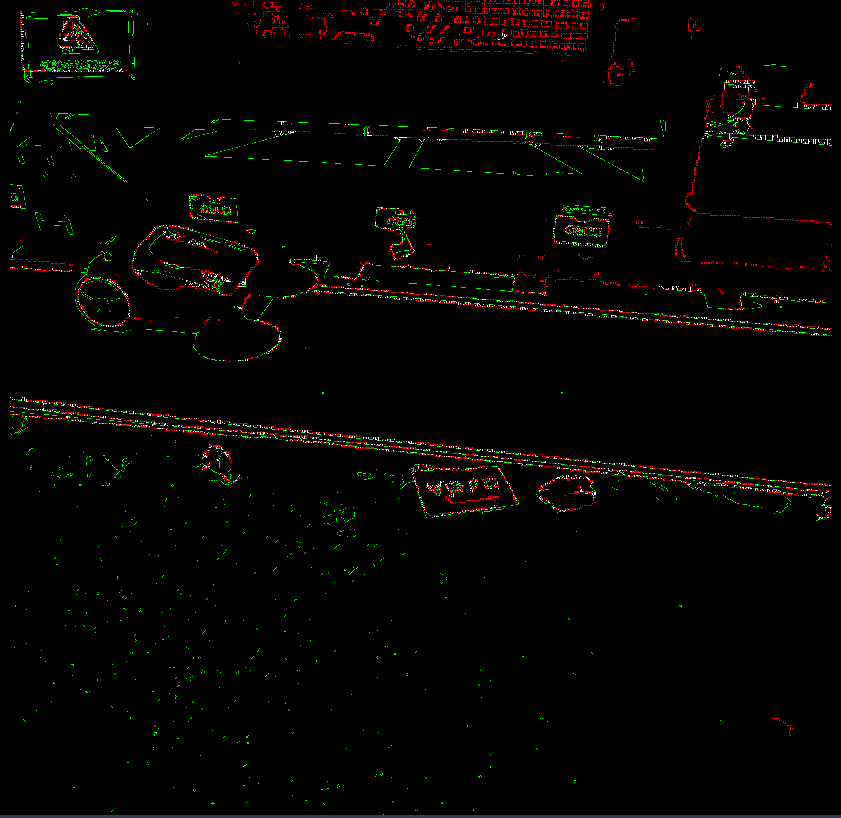
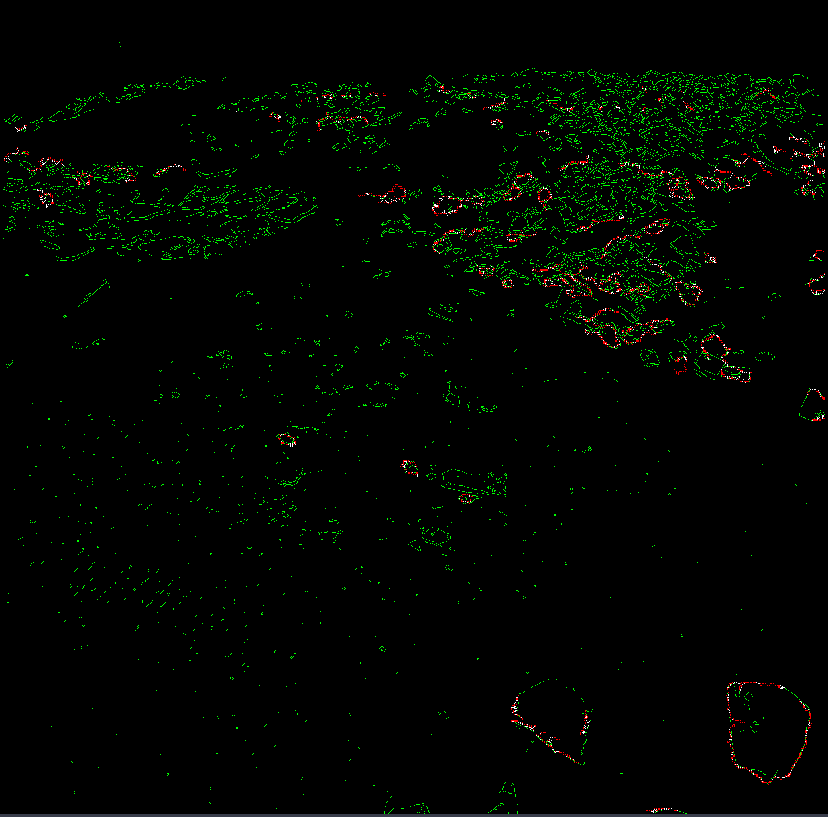
Canny Edge Extraction Results After Extrinsics Optimization Reprojection
Experiment 3
Canny Edge Extraction Results under Initial Calibration Extrinsics
Canny Edge Extraction Results After Extrinsics Optimization Reprojection
Experiment 4
Canny Edge Extraction Results under Initial Calibration Extrinsics
Canny Edge Extraction Results After Extrinsics Optimization Reprojection
Related Links
paper:
code: