PSINS-based Inertial Navigation System
Date:
The experiments used the open-source code PSINS developed by Dr. Yan Gongmin from Northwestern Polytechnical University.
Experiment 1
Experimental Setup
Sensor: WTGAHRS2
Handheld motion pattern.
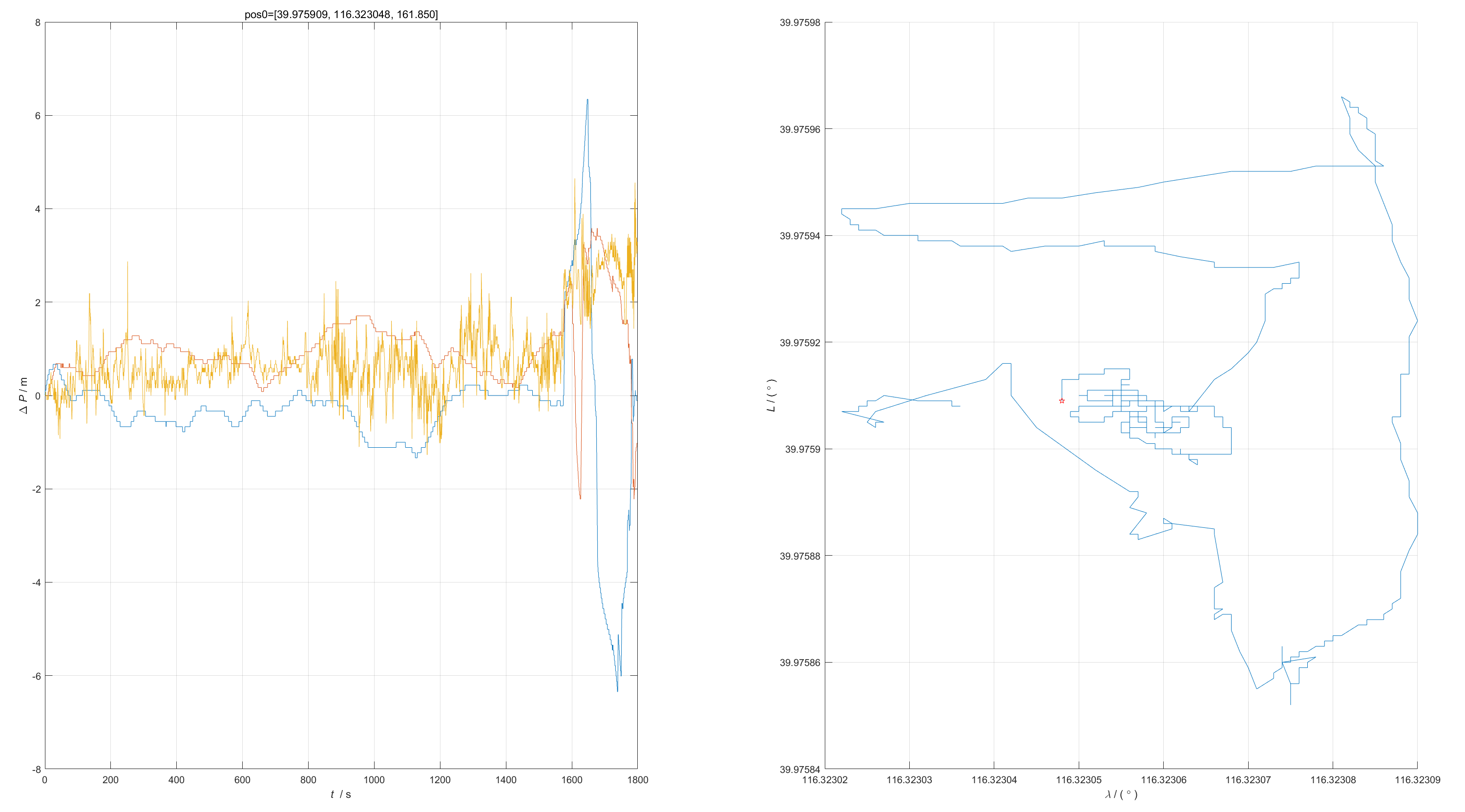
location: on the rooftop of China Satellite Communications Building, Zhichun Road, Haidian District, Beijing.
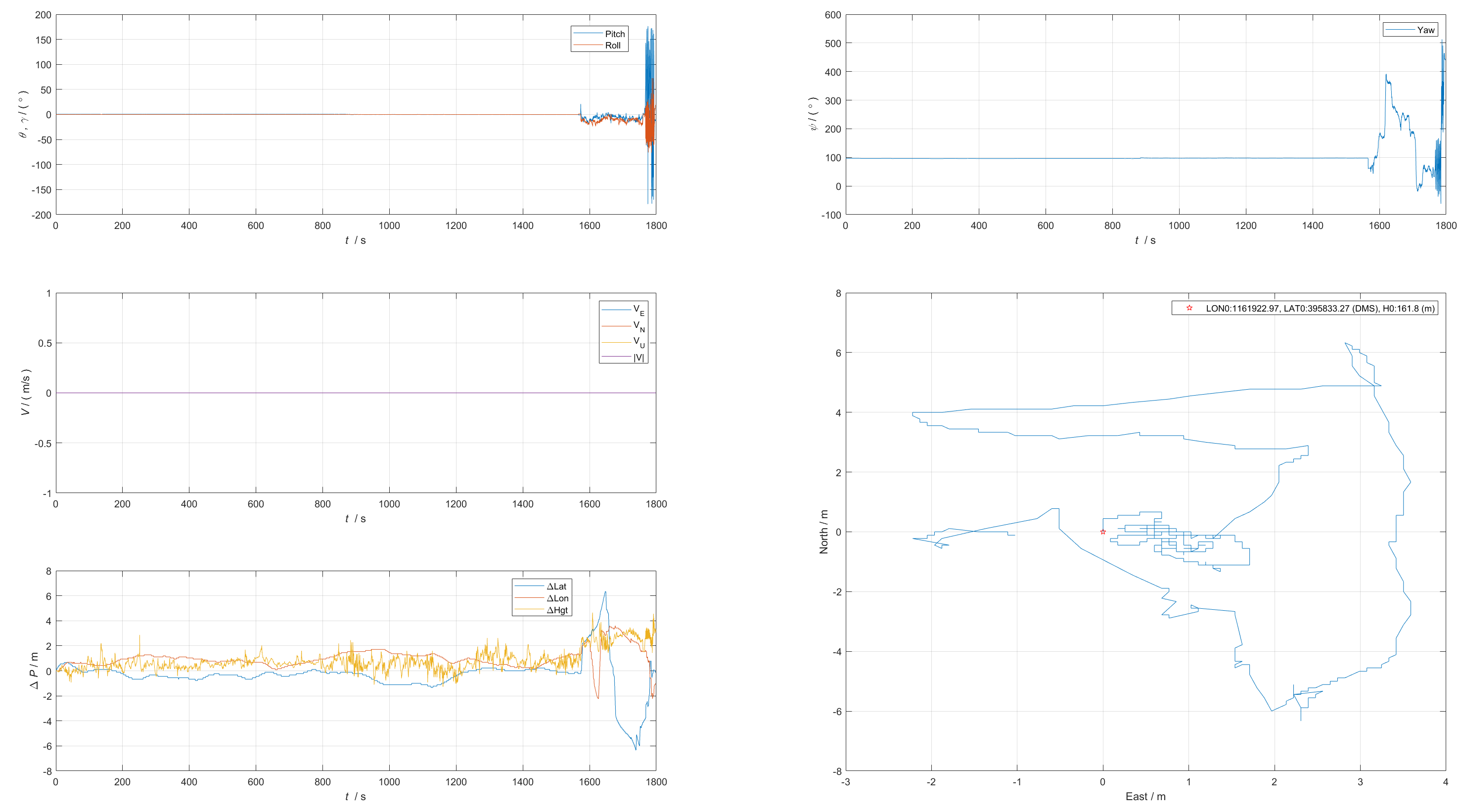
Experimental Results
| time(s) | 0-850 (14min) | 850-1080 (18min) | 1080-1560 (26min) | 1560-1760 (29min) | 1760-1800 (30min) |
|---|---|---|---|---|---|
| motion pattern | still | still | still | moving | figure-eight motion |
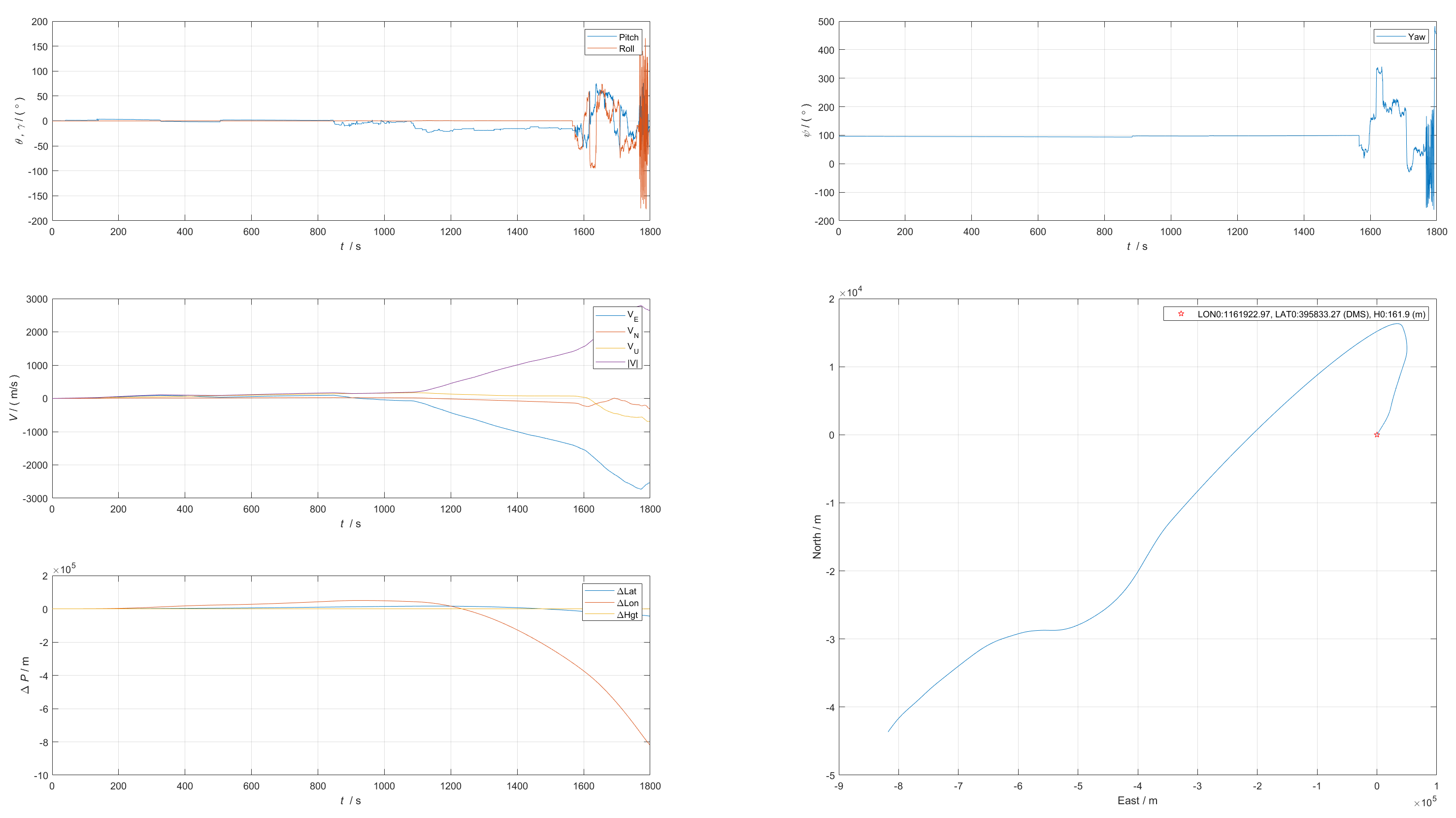
| Attitude error - pitch (deg) | <4 | <10 | <19 | <50 | <50 |
| Attitude error - roll (deg) | <0.25 | <0.25 | <0.25 | <50 | <50 |
| Heading error (deg) | <3 | <3 | <3 | <46 | <50 |
- Reference attitude/heading: AHRS, nominal accuracy: attitude 0.2 degrees, heading 1 degree.
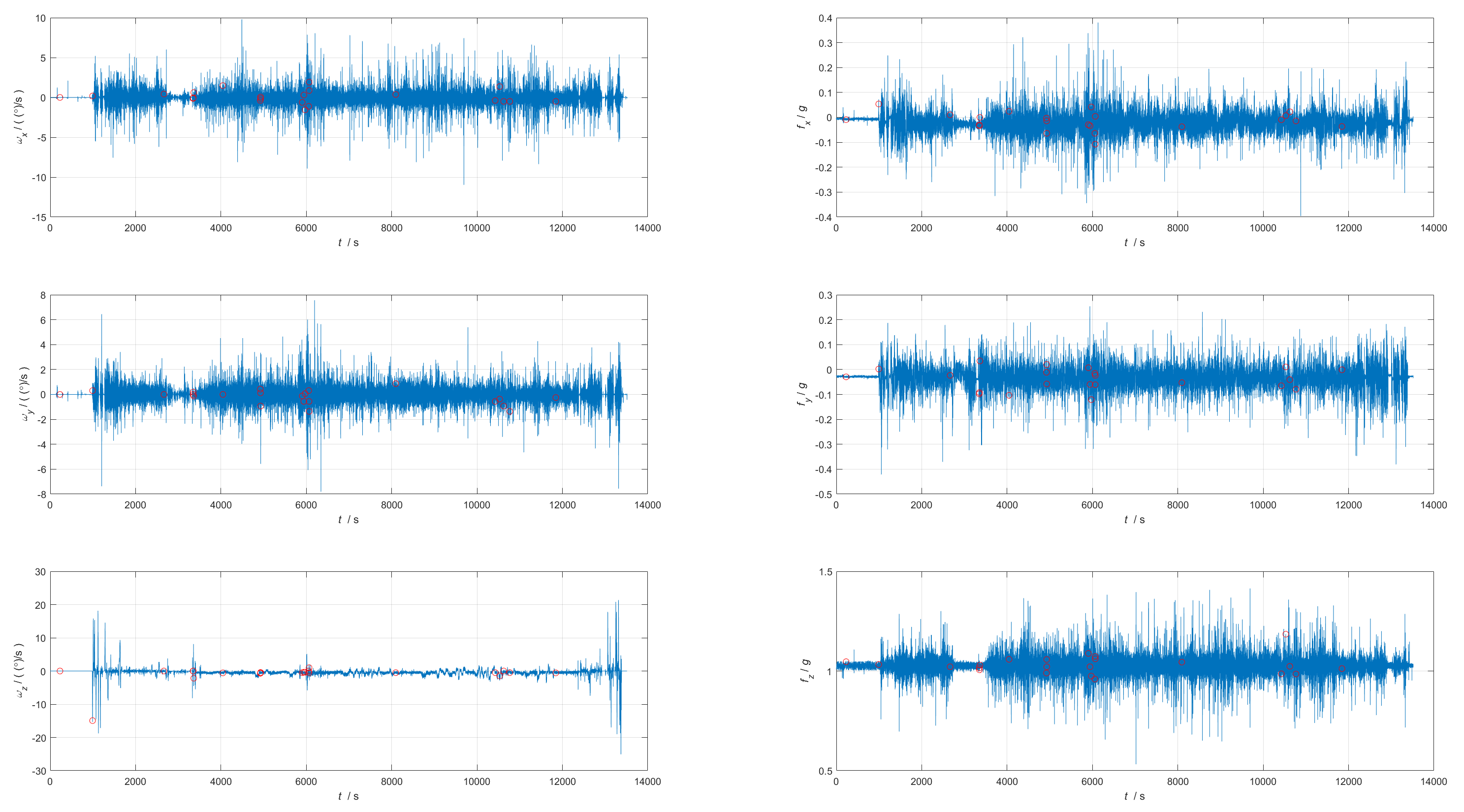
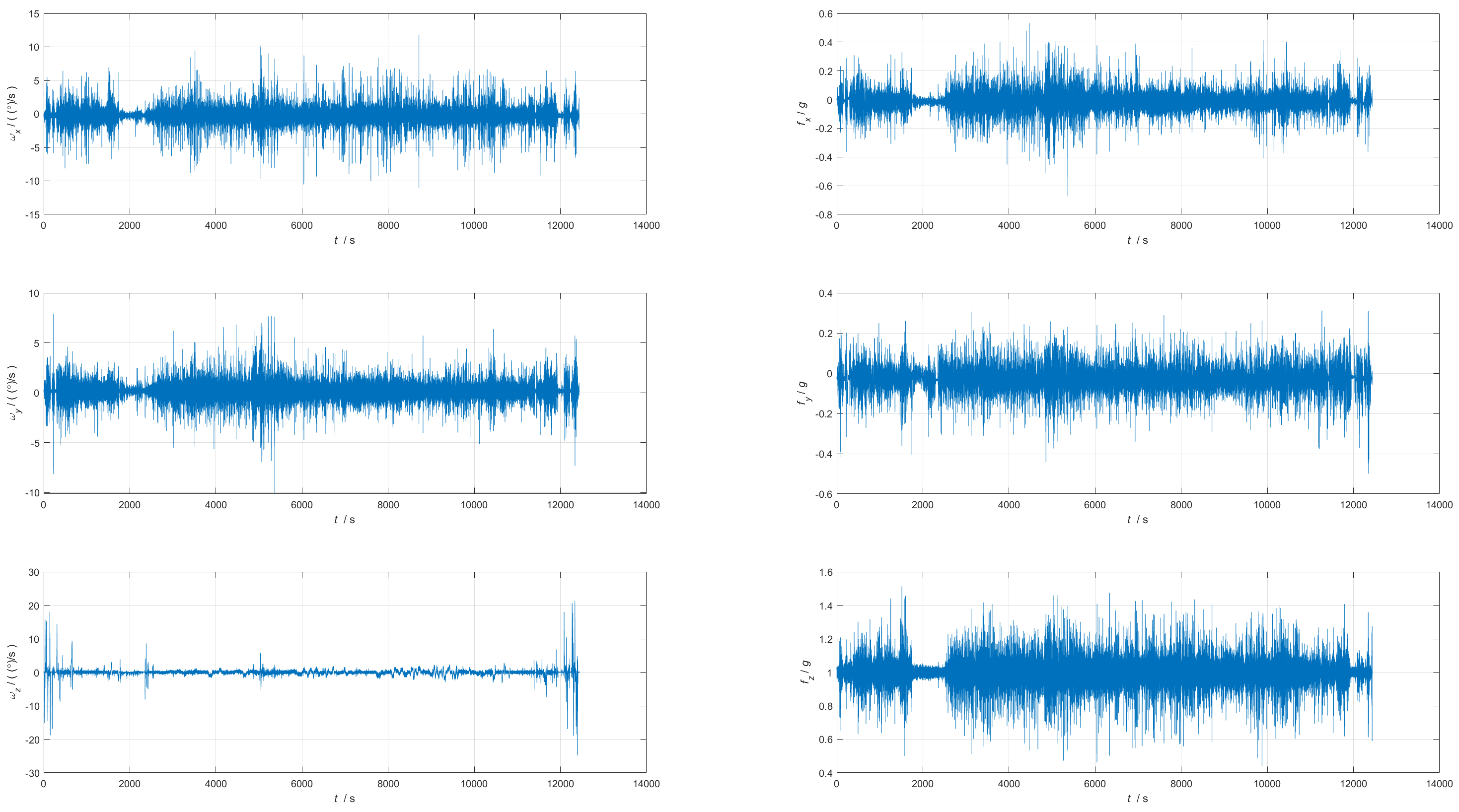
IMU
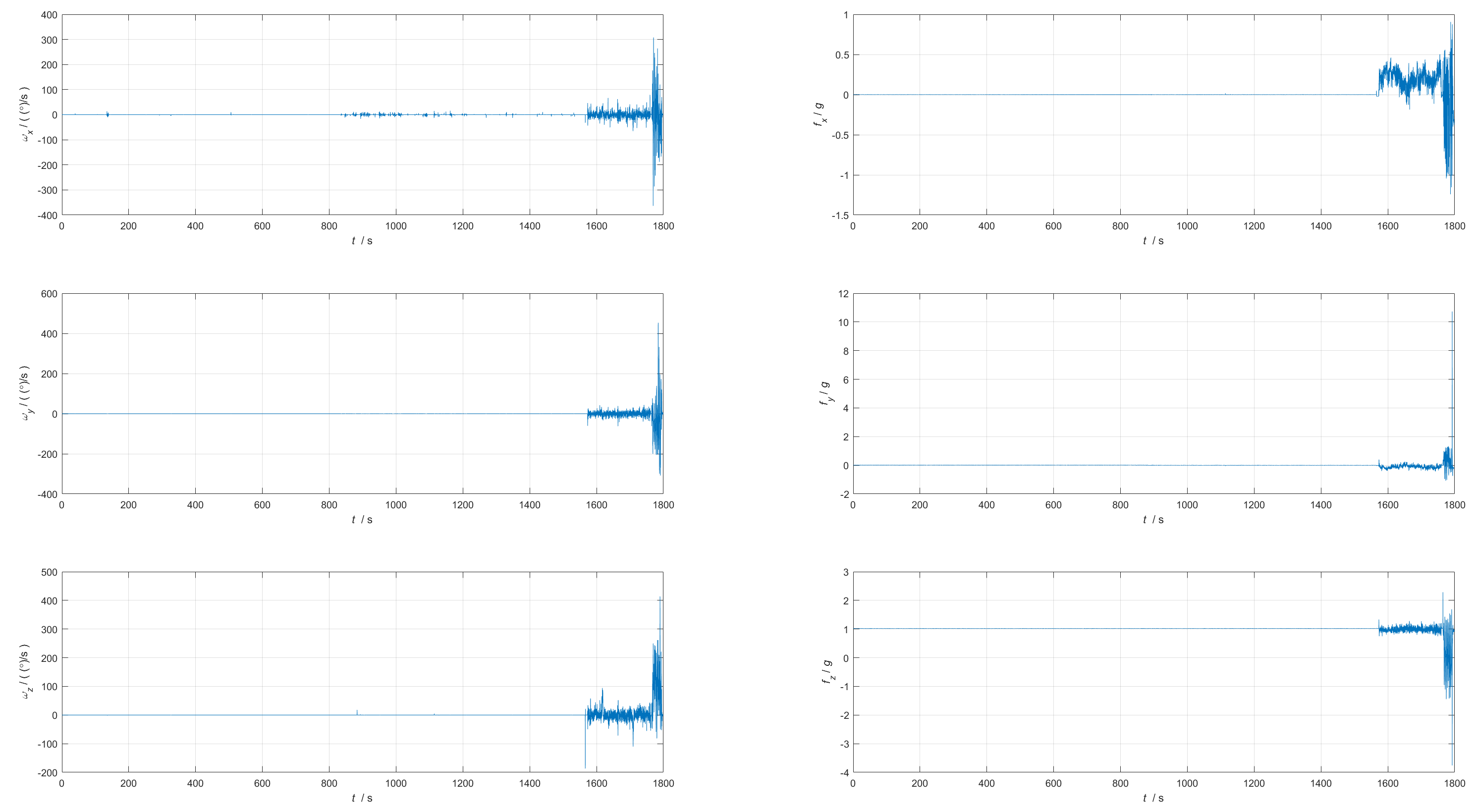
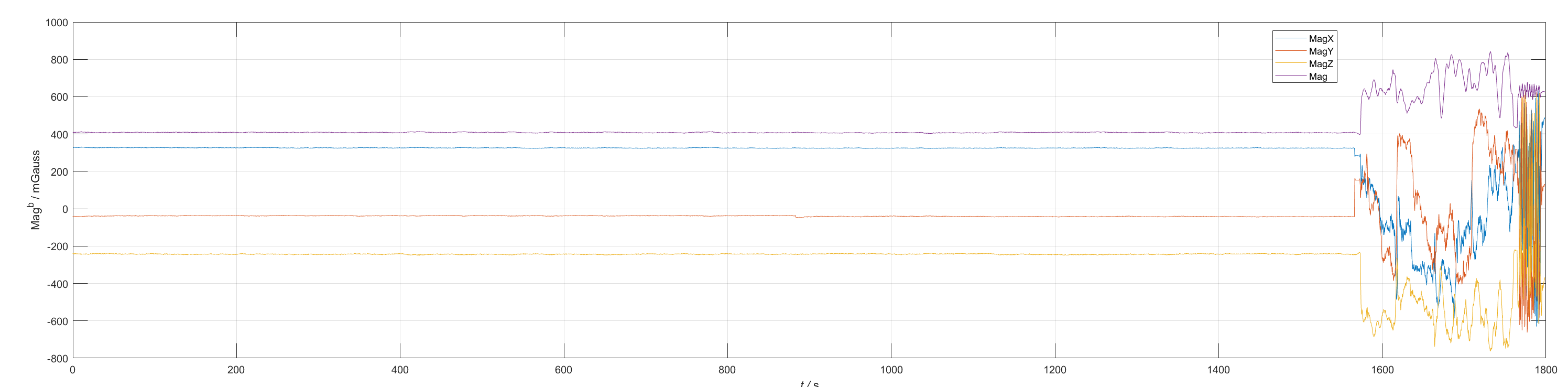
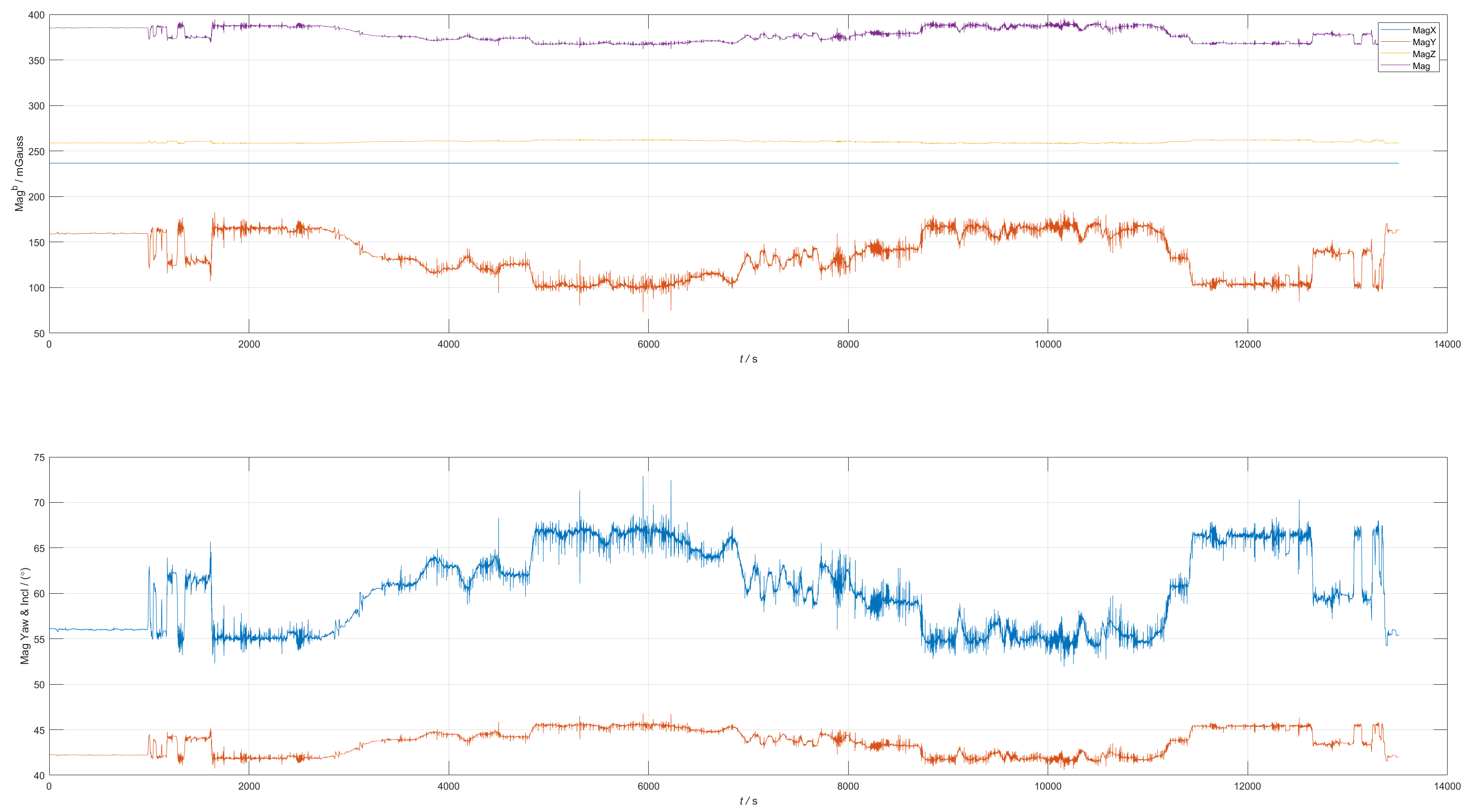
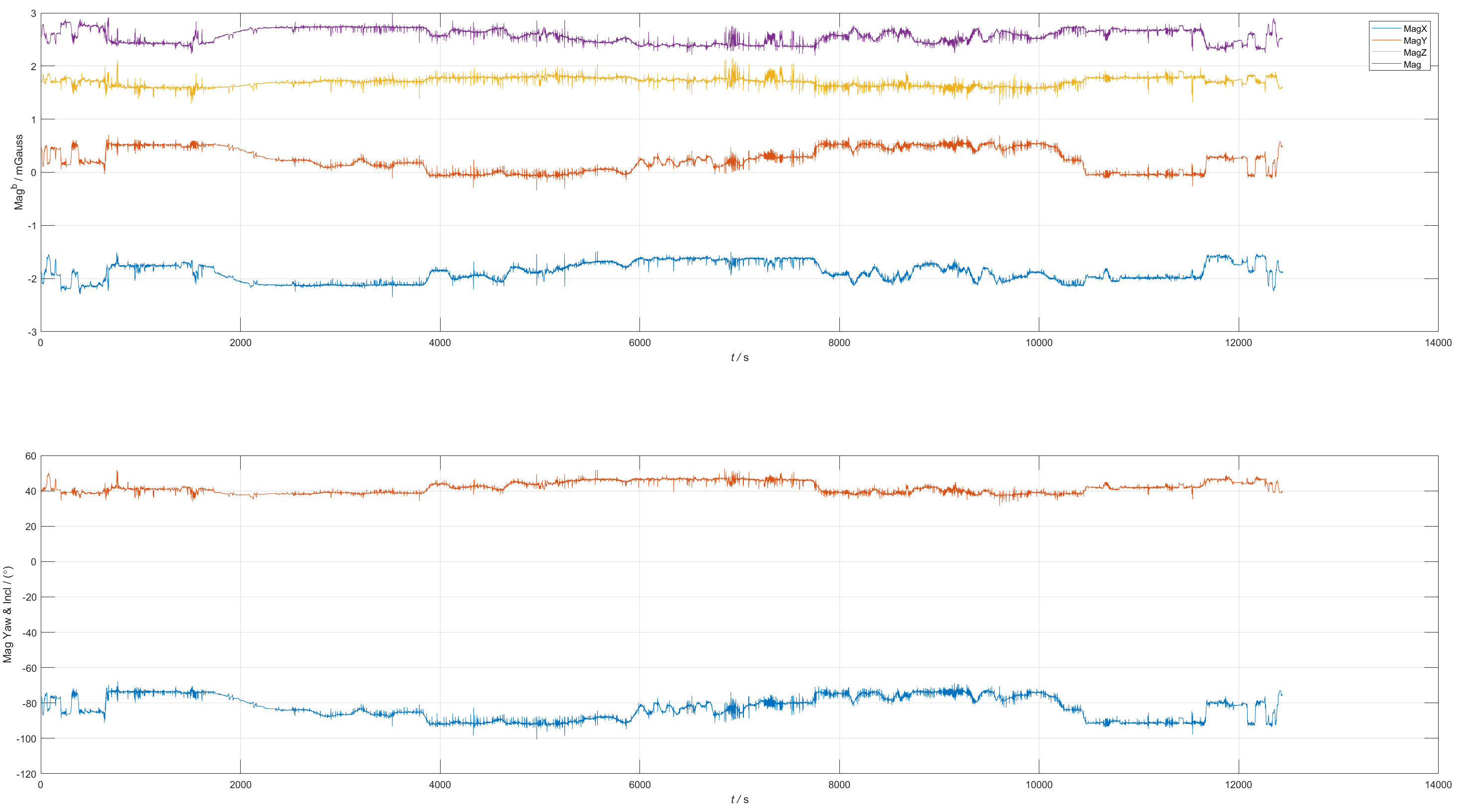
Magnetometer
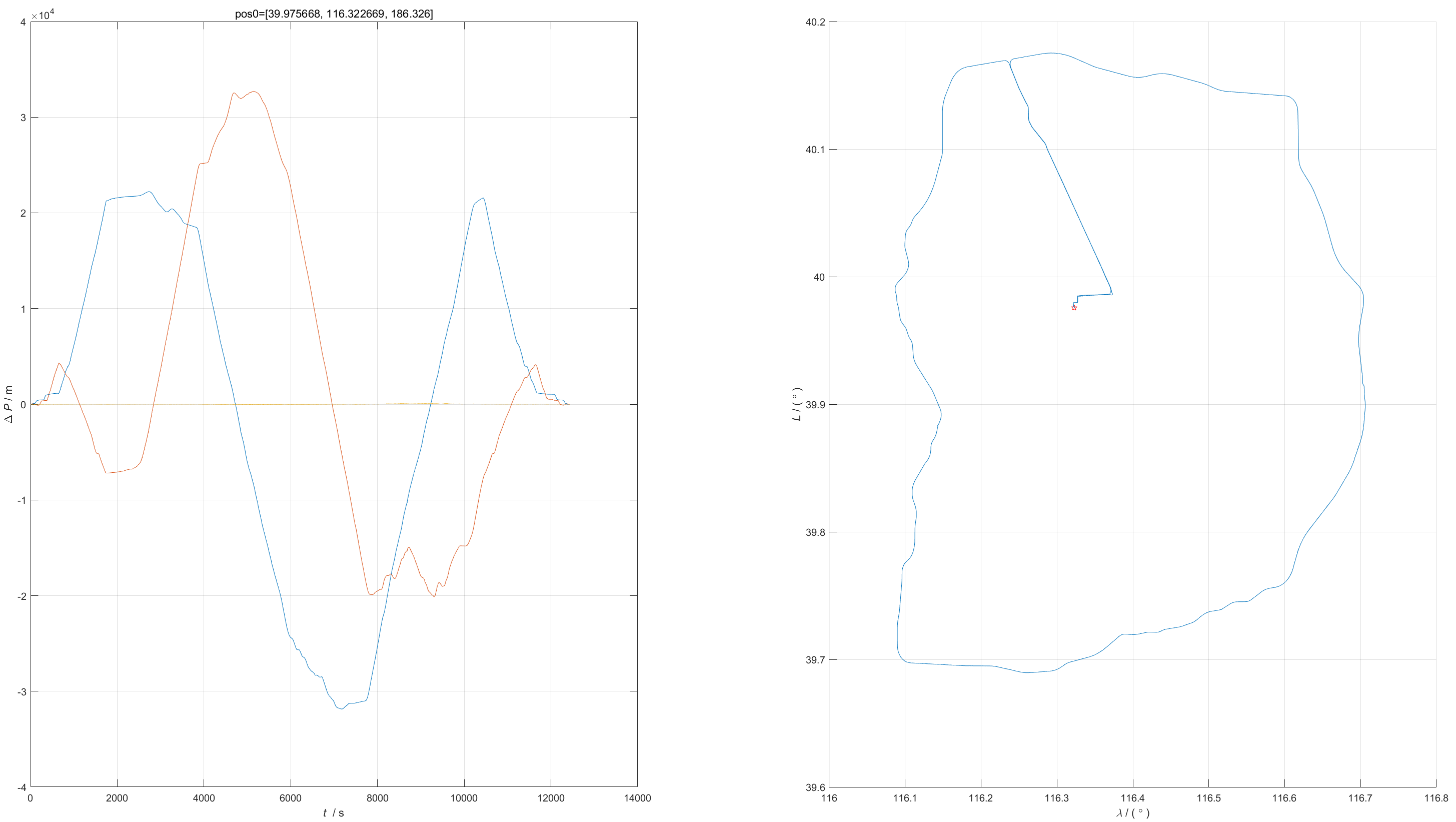
GPS
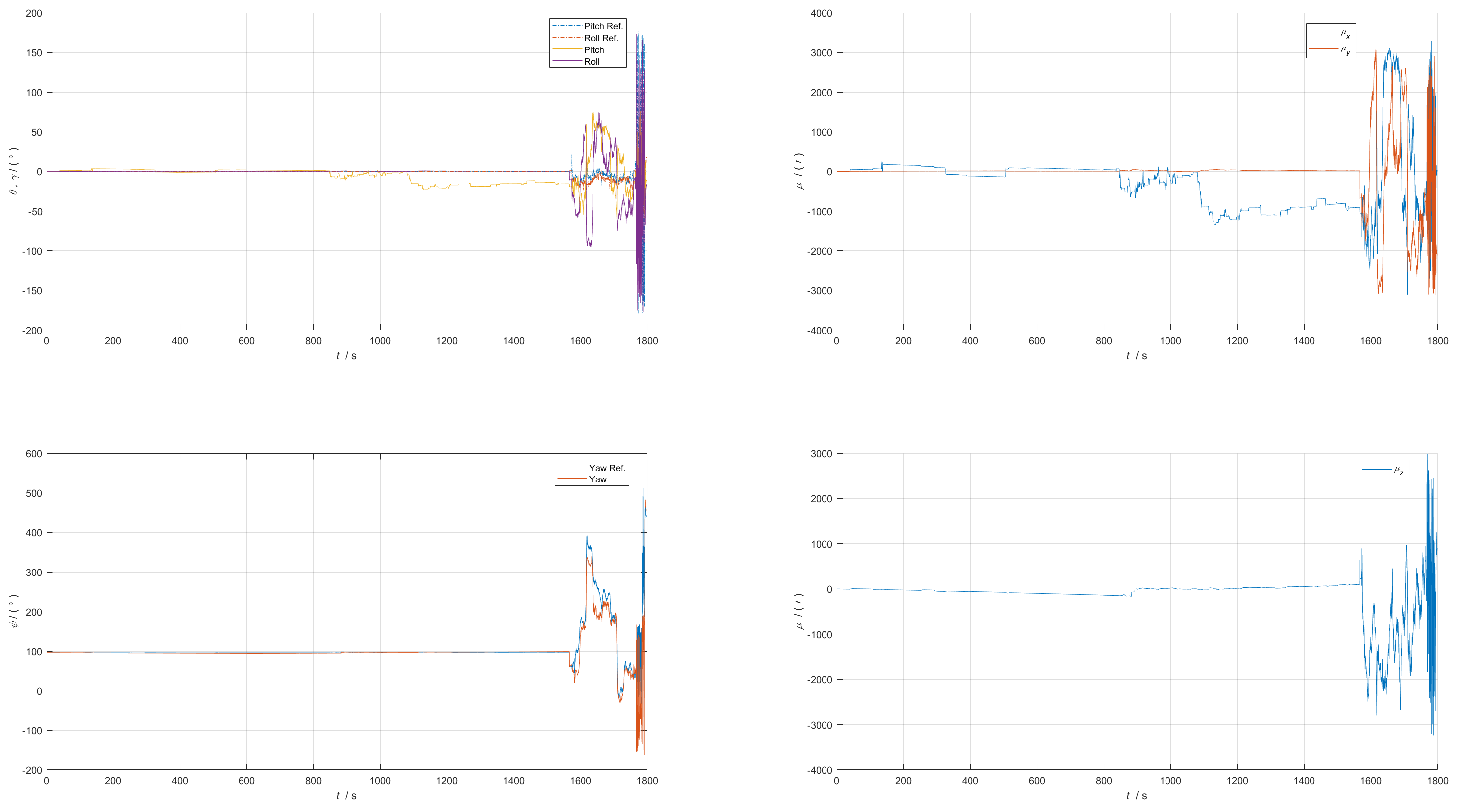
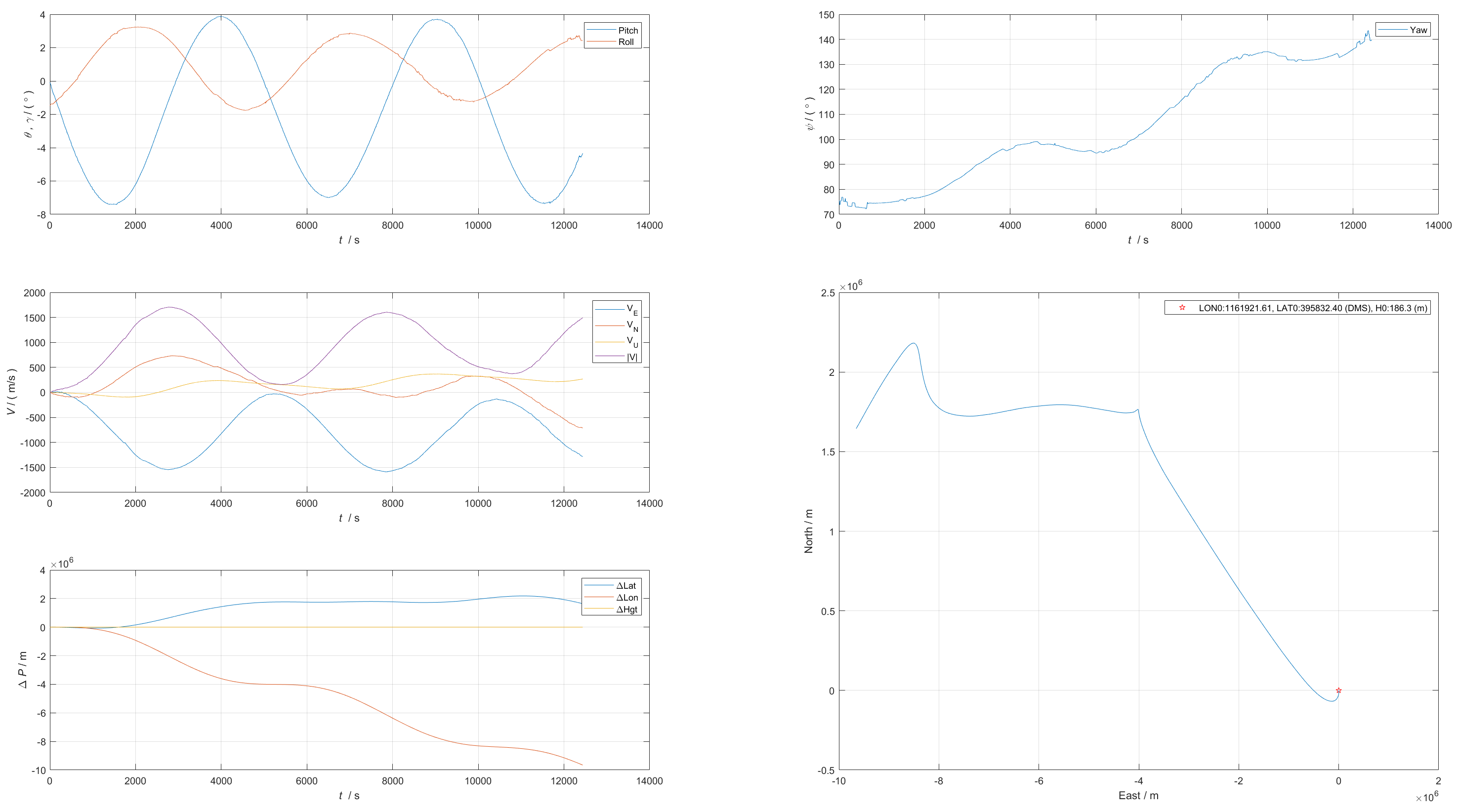
INS
AHRS & GPS
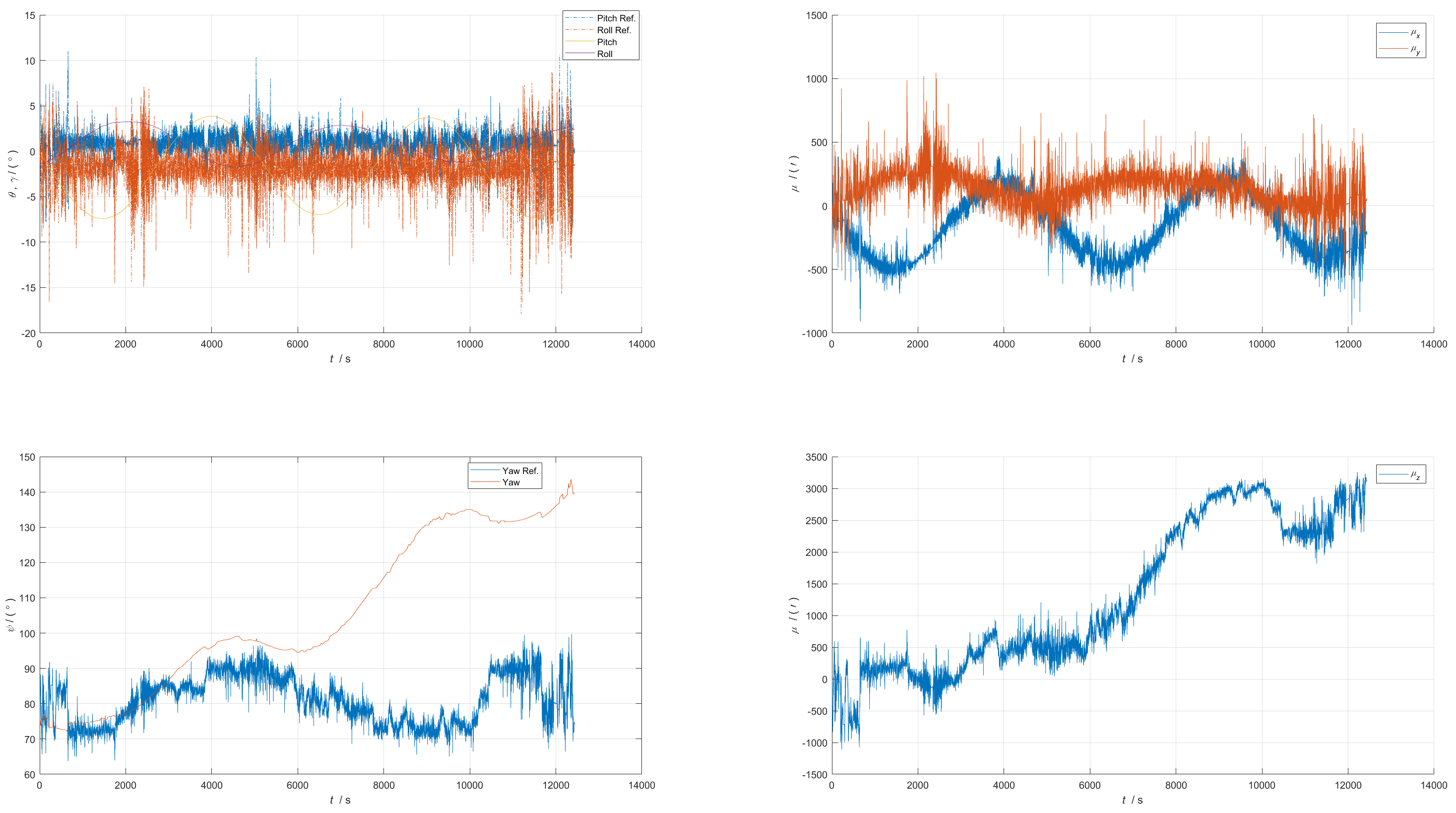
Compare AHRS and INS
Experiment 2
Experimental Setup
Sensor: WTGAHRS2
Vehicle-mounted motion.
Region: one loop along Beijing Sixth Ring Road.
Sensor installation (right-front-up, with the car facing the left side of the picture):

IMU
Mag
GNSS
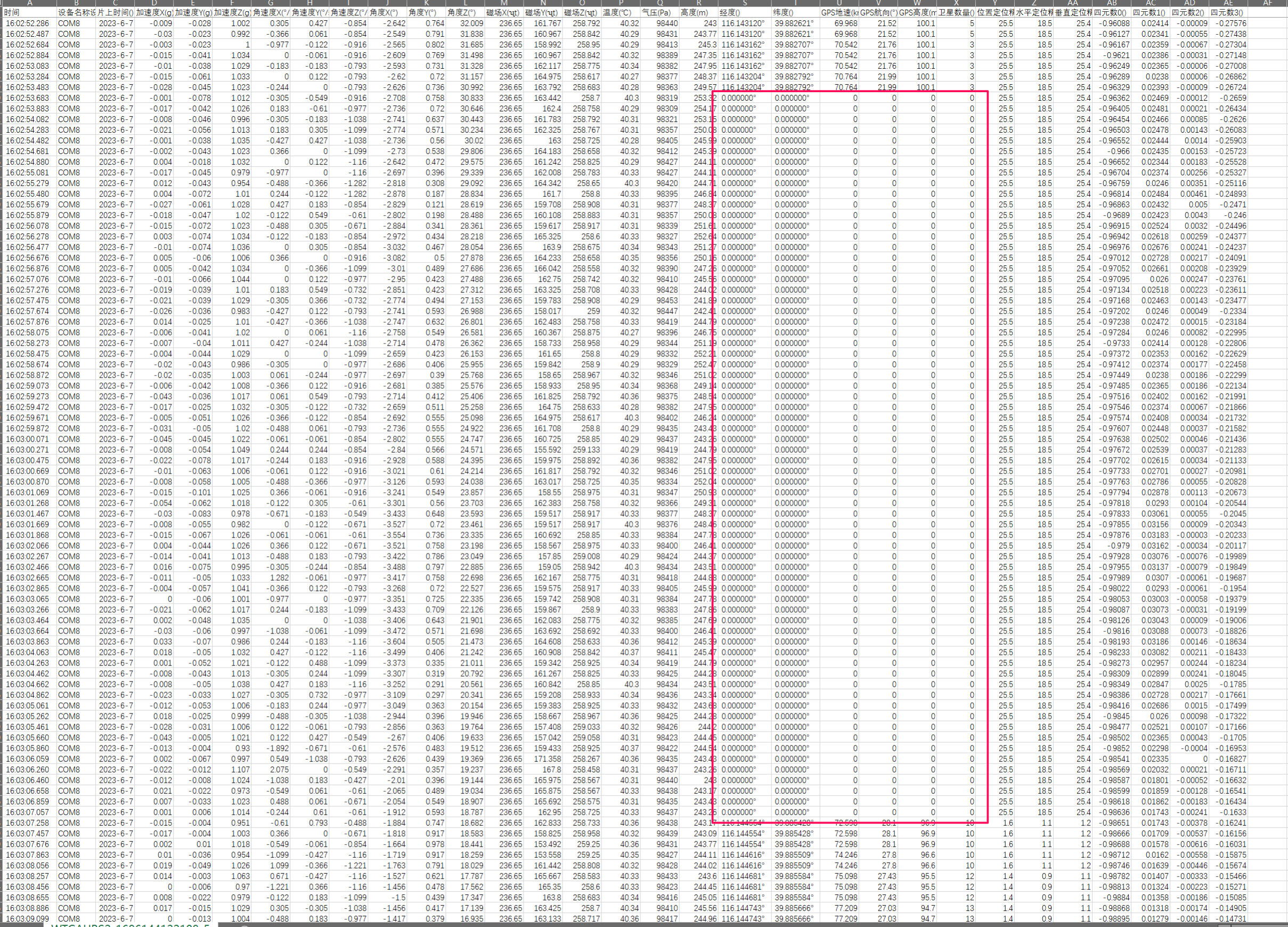
Remained near longitude 116.1 degrees and latitude 39.8 degrees throughout, and output zero values during the time period [16:02:53.683 - 16:03:07.057].
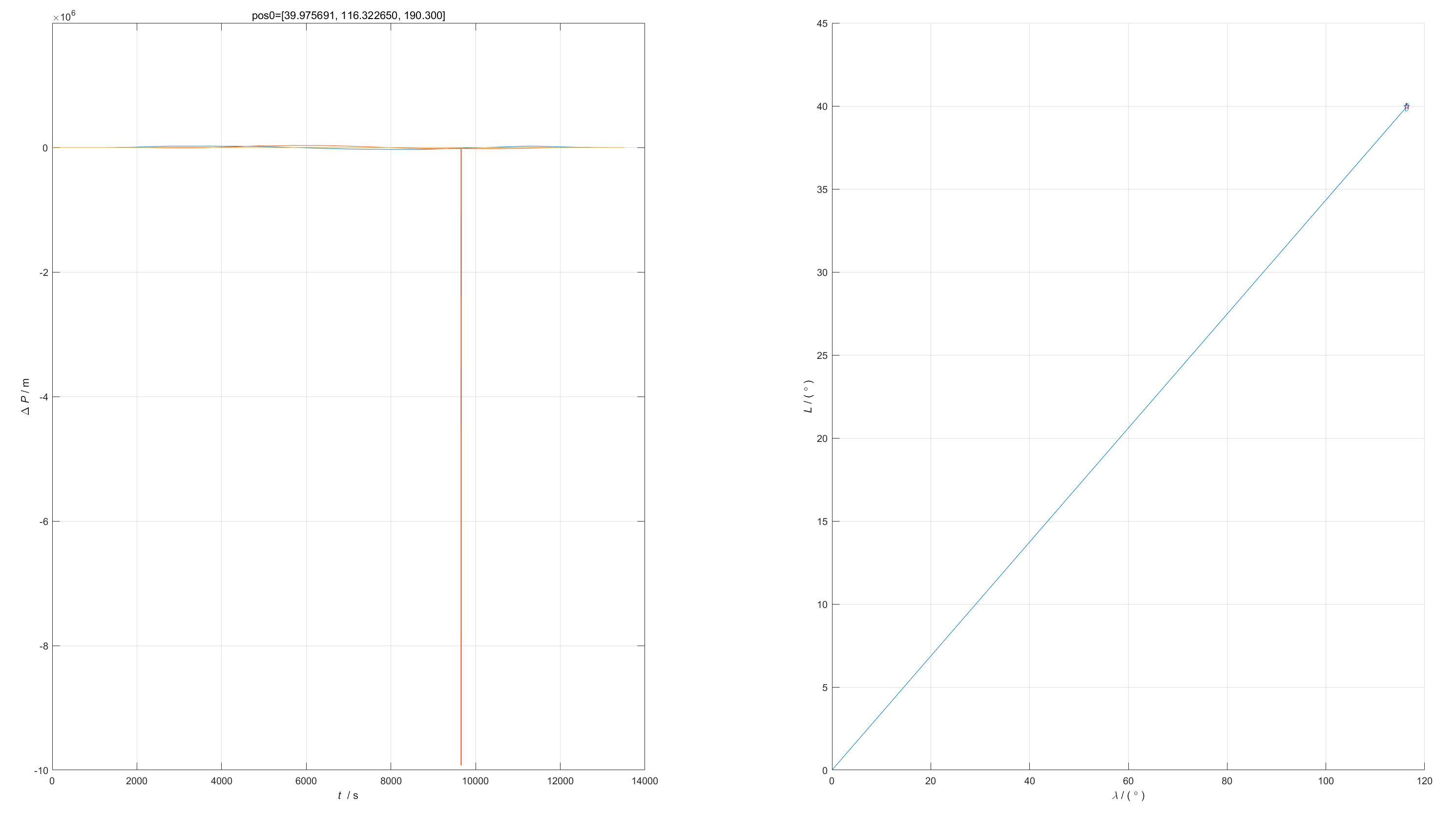
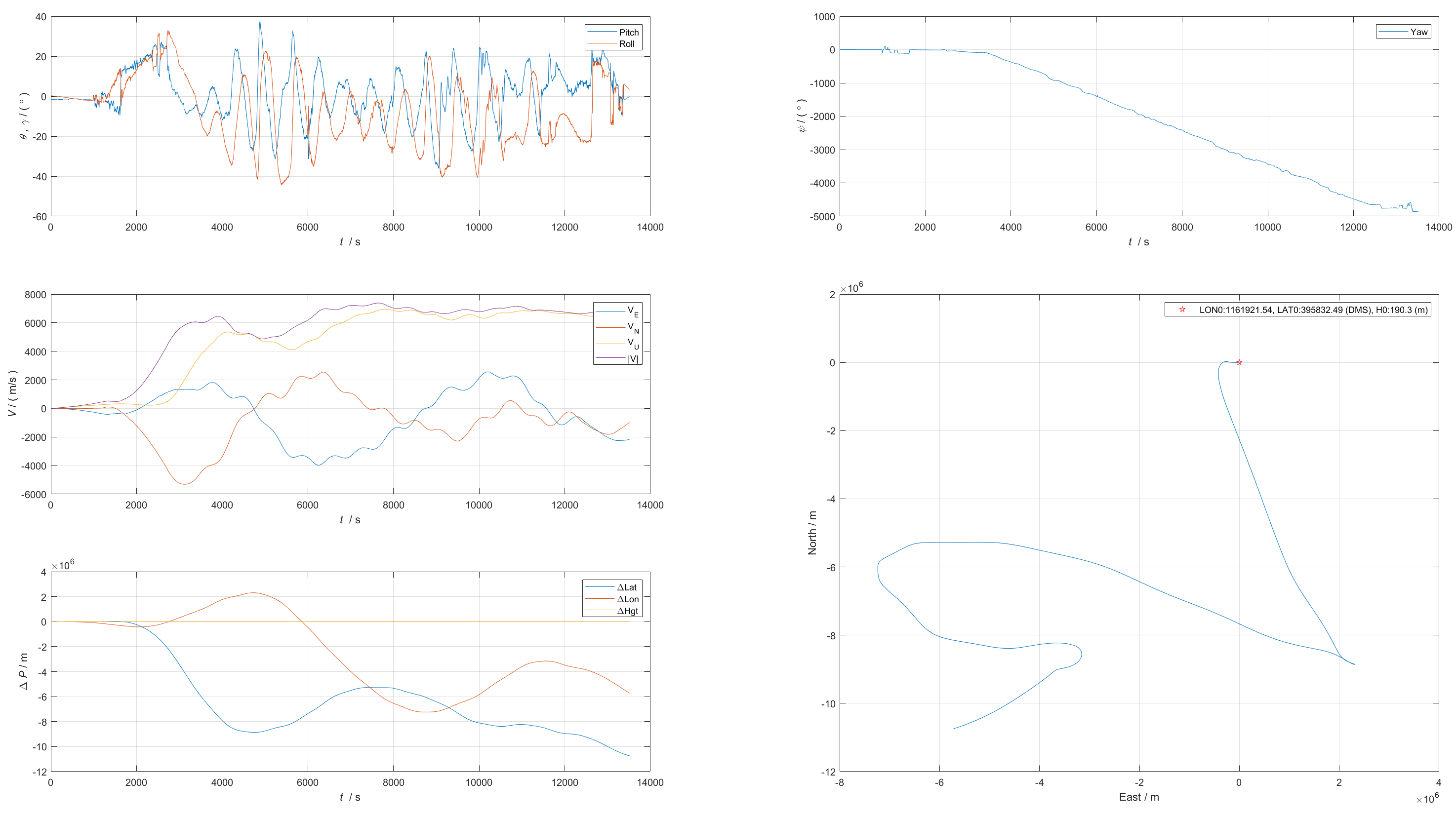
INS
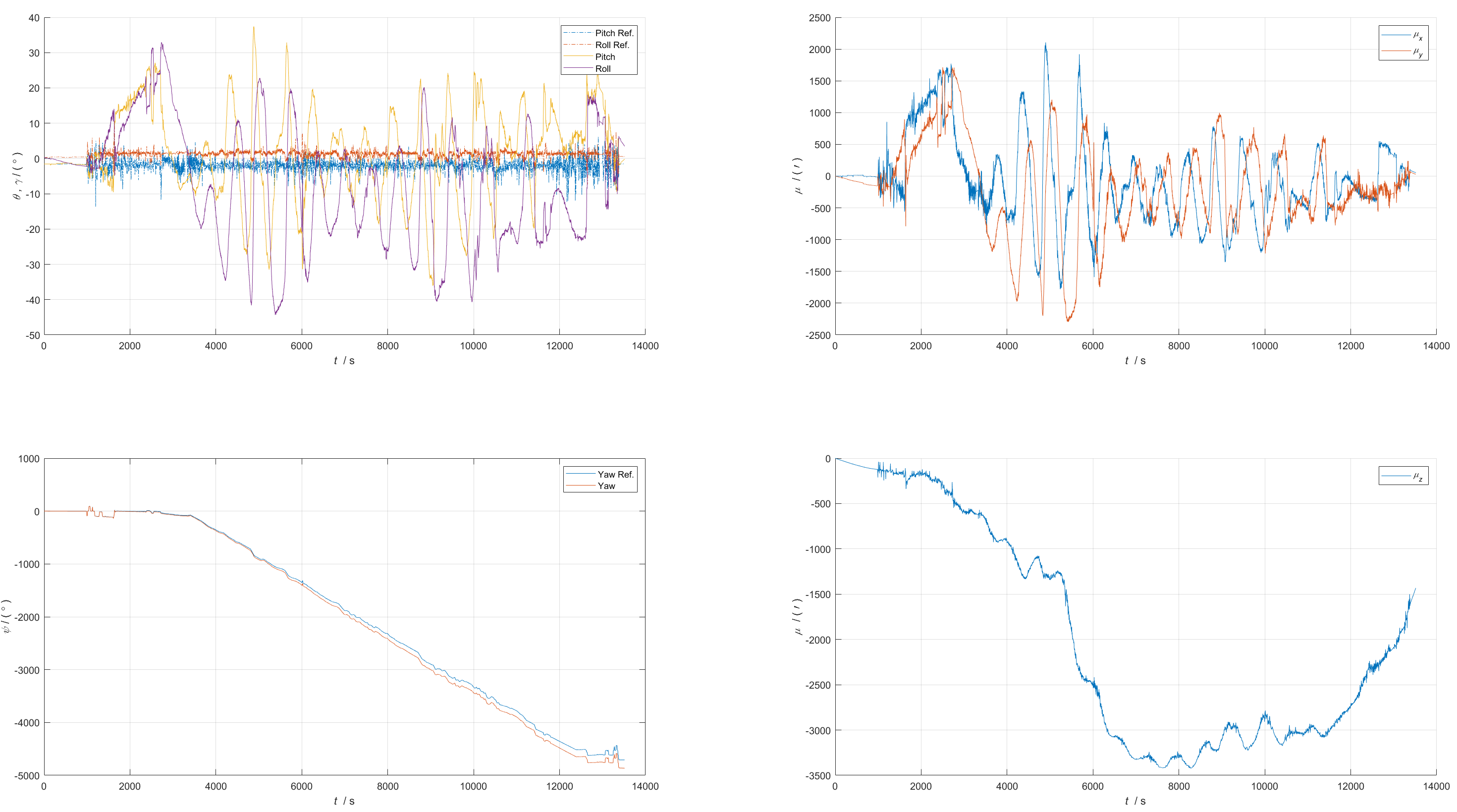
Compare AHRS and INS
Experiment 3
Experimental Setup
Sensor: 3DM-GX5-GNSS/INS
Vehicle-mounted motion.
Region: one loop along Beijing Sixth Ring Road.
Sensor installation (front-right-down, with the car facing the left side of the picture):

IMU
Mag
GNSS
INS
Compare AHRS and INS
- Attitude error <8.5deg
- Heading error
- 0~1h: <10deg
- 1~2h: <17deg
- 2~4h: <50deg
Related Links
code: