Caltech Lane Detection源码学习笔记
Published:
Caltech Lane Detection源码学习笔记.
直线参数化方法,以线段端点形式进行表示和存储:
/// Line structure with start and end points
typedef struct Line
{
///start point
FLOAT_POINT2D startPoint;
///end point
FLOAT_POINT2D endPoint;
///color of line
LineColor color;
///score of line
float score;
} Line;
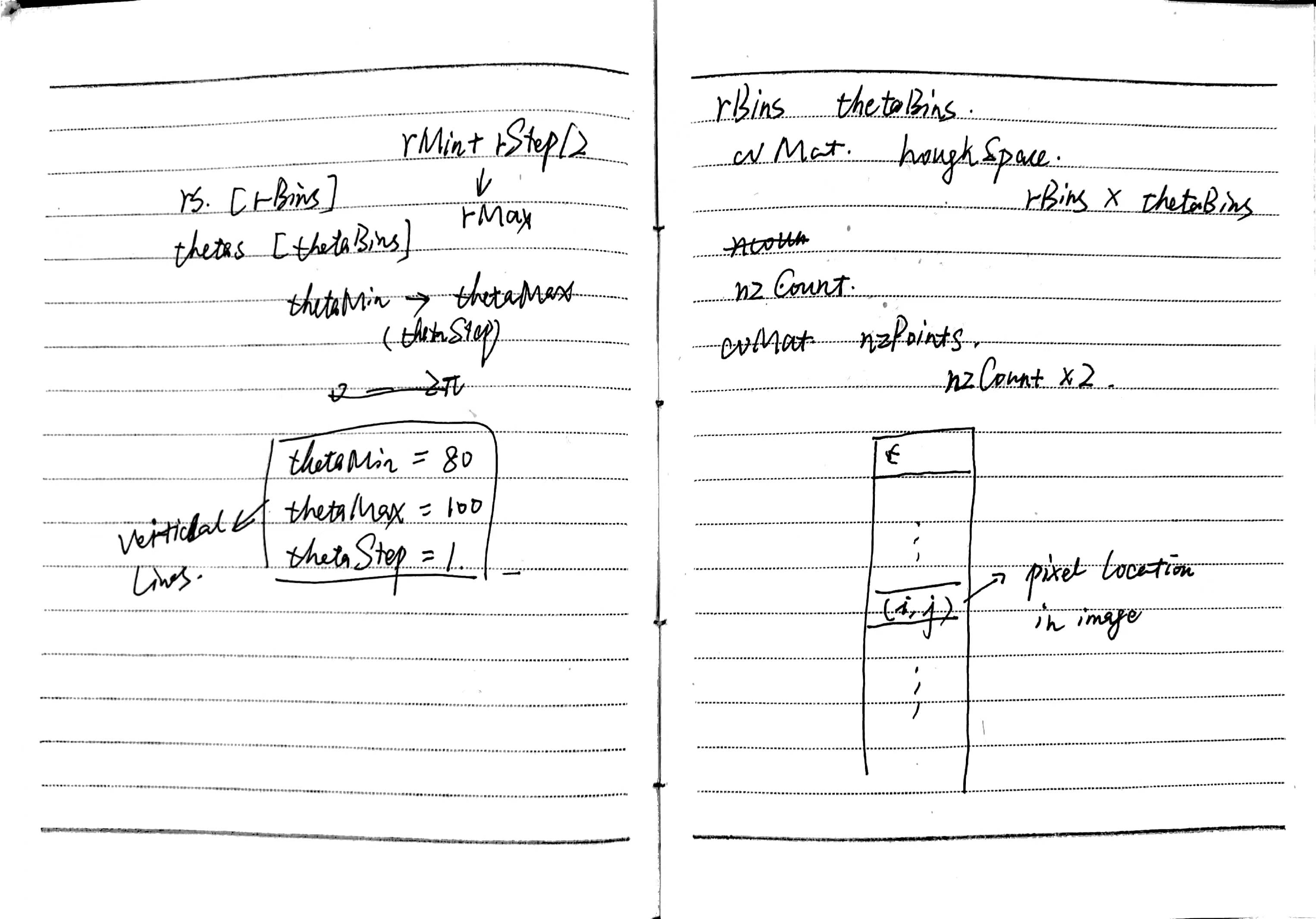
初始化二维直线参数\((r,\theta)\)的Bins:
//define the accumulator array: rows correspond to r and columns to theta
int rBins = int((rMax-rMin)/rStep);
int thetaBins = int((thetaMax-thetaMin)/thetaStep);
CvMat *houghSpace = cvCreateMat(rBins, thetaBins, CV_MAT_TYPE(image->type)); //FLOAT_MAT_TYPE);
assert(houghSpace!=0);
//init to zero
cvSet(houghSpace, cvRealScalar(0));
//init values of r and theta
FLOAT *rs = new FLOAT[rBins];
FLOAT *thetas = new FLOAT[thetaBins];
FLOAT r, theta;
int ri, thetai;
for (r=rMin+rStep/2, ri=0 ; ri<rBins; ri++,r+=rStep)
rs[ri] = r;
for (theta=thetaMin, thetai=0 ; thetai<thetaBins; thetai++,
theta+=thetaStep)
thetas[thetai] = theta;
//get non-zero points in the image
int nzCount = cvCountNonZero(image);
CvMat *nzPoints = cvCreateMat(nzCount, 2, CV_32SC1);
int idx = 0;
for (int i=0; i<image->width; i++)
for (int j=0; j<image->height; j++)
if ( cvGetReal2D(image, j, i) )
{
CV_MAT_ELEM(*nzPoints, int, idx, 0) = i;
CV_MAT_ELEM(*nzPoints, int, idx, 1) = j;
idx++;
}
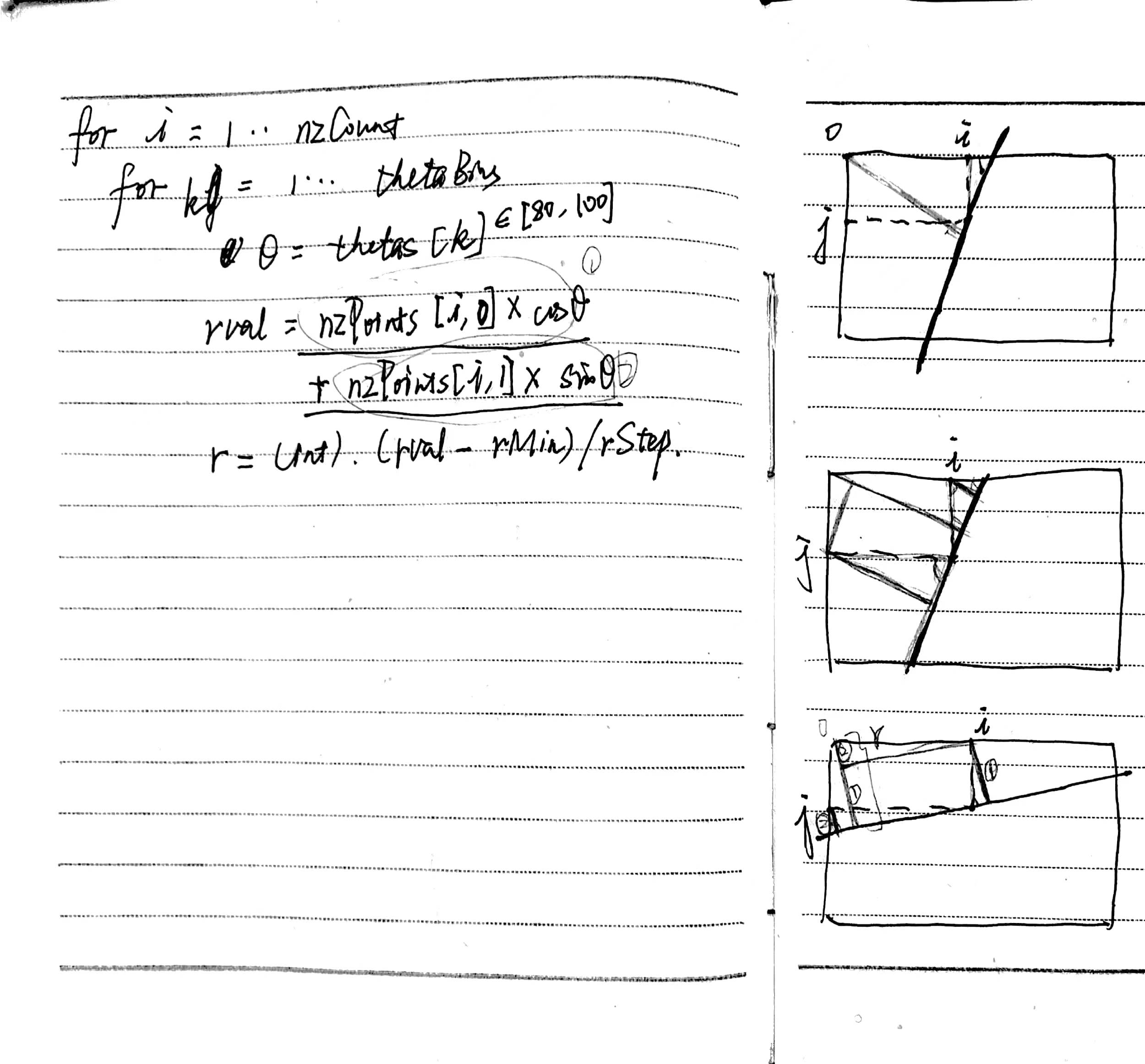
IPM图像像素空间到Hough空间的转换:
//calculate r values for all theta and all points
int i, k; //j
for (i=0; i<nzCount; i++)
for (k=0; k<thetaBins; k++)
{
//compute the r value for that point and that theta
theta = thetas[k];
float rval = CV_MAT_ELEM(*nzPoints, int, i, 0) * cos(theta) +
CV_MAT_ELEM(*nzPoints, int, i, 1) * sin(theta); //x y
int r = (int)( ( rval - rMin) / rStep);
// CV_MAT_ELEM(*rPoints, int, i, k) =
//(int)( ( rval - rMin) / rStep);
//accumulate in the hough space if a valid value
if (r>=0 && r<rBins)
if(binarize)
CV_MAT_ELEM(*houghSpace, INT_MAT_ELEM_TYPE, r, k)++;
//CV_MAT_ELEM(*image, INT_MAT_ELEM_TYPE, j, i);
else
CV_MAT_ELEM(*houghSpace, FLOAT_MAT_ELEM_TYPE, r, k)+=
CV_MAT_ELEM(*image, FLOAT_MAT_ELEM_TYPE,
CV_MAT_ELEM(*nzPoints, int, i, 1),
CV_MAT_ELEM(*nzPoints, int, i, 0));
}
Stoplines.conf文件中Hough聚类各参数设置情况:
##Hough Transform settings
rMin = 0 #0
rMax = 120 #120
rStep = 3 #3#1
thetaMin = 80 #80#85
thetaMax = 100 #100#95
thetaStep = 1 #2#1
第8、9行的几何理解:
Hough空间平滑,并寻找局部极值,作为候选直线参数:
//smooth hough transform
if (smoothScores)
cvSmooth(houghSpace, houghSpace, CV_GAUSSIAN, 3);
//get local maxima
vector <double> maxLineScores;
vector <CvPoint> maxLineLocs;
if (localMaxima)
{
//get local maxima in the hough space
mcvGetMatLocalMax(houghSpace, maxLineScores, maxLineLocs, detectionThreshold);
}
else
{
//get the maxima above the threshold
mcvGetMatMax(houghSpace, maxLineScores, maxLineLocs, detectionThreshold);
}
//get the maximum value
double maxLineScore;
CvPoint maxLineLoc;
cvMinMaxLoc(houghSpace, 0, &maxLineScore, 0, &maxLineLoc);
if (maxLineScores.size()==0 && maxLineScore>=detectionThreshold)
{
maxLineScores.push_back(maxLineScore);
maxLineLocs.push_back(maxLineLoc);
}
mcvGetMatLocalMax()函数实现:
/** This function gets the local maxima in a matrix and their positions
* and its location
*
* \param inMat input matrix
* \param localMaxima the output vector of local maxima
* \param localMaximaLoc the vector of locations of the local maxima,
* where each location is cvPoint(x=col, y=row) zero-based
*
*/
void mcvGetMatLocalMax(const CvMat *inMat, vector<double> &localMaxima,
vector<CvPoint> &localMaximaLoc, double threshold)
{
double val;
#define MCV_MAT_LOCAL_MAX(type) \
/*loop on the matrix and get points that are larger than their*/ \
/*neighboring 8 pixels*/ \
for(int i=1; i<inMat->rows-1; i++) \
for (int j=1; j<inMat->cols-1; j++) \
{ \
/*get the current value*/ \
val = CV_MAT_ELEM(*inMat, type, i, j); \
/*check if it's larger than all its neighbors*/ \
if( val > CV_MAT_ELEM(*inMat, type, i-1, j-1) && \
val > CV_MAT_ELEM(*inMat, type, i-1, j) && \
val > CV_MAT_ELEM(*inMat, type, i-1, j+1) && \
val > CV_MAT_ELEM(*inMat, type, i, j-1) && \
val > CV_MAT_ELEM(*inMat, type, i, j+1) && \
val > CV_MAT_ELEM(*inMat, type, i+1, j-1) && \
val > CV_MAT_ELEM(*inMat, type, i+1, j) && \
val > CV_MAT_ELEM(*inMat, type, i+1, j+1) && \
val >= threshold) \
{ \
/*found a local maxima, put it in the return vector*/ \
/*in decending order*/ \
/*iterators for the two vectors*/ \
vector<double>::iterator k; \
vector<CvPoint>::iterator l; \
/*loop till we find the place to put it in descendingly*/ \
for(k=localMaxima.begin(), l=localMaximaLoc.begin(); \
k != localMaxima.end() && val<= *k; k++,l++); \
/*add its index*/ \
localMaxima.insert(k, val); \
localMaximaLoc.insert(l, cvPoint(j, i)); \
} \
}
}
mcvGetMatMax()函数实现:
/** This function gets the locations and values of all points
* above a certain threshold
*
* \param inMat input matrix
* \param maxima the output vector of maxima
* \param maximaLoc the vector of locations of the maxima,
* where each location is cvPoint(x=col, y=row) zero-based
*
*/
void mcvGetMatMax(const CvMat *inMat, vector<double> &maxima,
vector<CvPoint> &maximaLoc, double threshold)
{
double val;
#define MCV_MAT_MAX(type) \
/*loop on the matrix and get points that are larger than their*/ \
/*neighboring 8 pixels*/ \
for(int i=1; i<inMat->rows-1; i++) \
for (int j=1; j<inMat->cols-1; j++) \
{ \
/*get the current value*/ \
val = CV_MAT_ELEM(*inMat, type, i, j); \
/*check if it's larger than threshold*/ \
if (val >= threshold) \
{ \
/*found a maxima, put it in the return vector*/ \
/*in decending order*/ \
/*iterators for the two vectors*/ \
vector<double>::iterator k; \
vector<CvPoint>::iterator l; \
/*loop till we find the place to put it in descendingly*/ \
for(k=maxima.begin(), l=maximaLoc.begin(); \
k != maxima.end() && val<= *k; k++,l++); \
/*add its index*/ \
maxima.insert(k, val); \
maximaLoc.insert(l, cvPoint(j, i)); \
} \
}
}
对Hough空间中距离较近的直线进行融合。
论文相关段落:
This sum is then smoothed by a Gaussian filter, local maxima are detected to get positions of lines, and then this is further refined to get sub-pixel accuracy by fitting a parabola to the local maxima and its two neighbors. At last, nearby lines are grouped together to eliminate multiple responses to the same line.
代码:
//group detected maxima
if (group && maxLineScores.size()>1)
{
//flag for stopping
bool stop = false;
while (!stop)
{
//minimum distance so far
float minDist = groupThreshold+5, dist = 0.;
vector<CvPoint>::iterator iloc, jloc,
minIloc=maxLineLocs.begin(), minJloc=minIloc+1;
vector<double>::iterator iscore, jscore, minIscore, minJscore;
//compute pairwise distance between detected maxima
for (iloc=maxLineLocs.begin(), iscore=maxLineScores.begin();
iloc!=maxLineLocs.end(); iloc++, iscore++)
for (jscore=iscore+1, jloc=iloc+1; jscore!=maxLineScores.end();
jloc++, jscore++)
{
//add pi if neg
float t1 = thetas[iloc->x]<0 ? thetas[iloc->x] : thetas[iloc->x]+CV_PI;
float t2 = thetas[jloc->x]<0 ? thetas[jloc->x] : thetas[jloc->x]+CV_PI;
//get distance
dist = fabs(rs[iloc->y]-rs[jloc->y]) +
0.1 * fabs(t1 - t2);//fabs(thetas[iloc->x]-thetas[jloc->x]);
//check if minimum
if (dist<minDist)
{
minDist = dist;
minIloc = iloc; minIscore = iscore;
minJloc = jloc; minJscore = jscore;
}
}
//check if minimum distance is less than groupThreshold
if (minDist >= groupThreshold)
stop = true;
else
{
//combine the two minimum ones with weighted average of
//their scores
double x = (minIloc->x * *minIscore + minJloc->x * *minJscore) /
(*minIscore + *minJscore);
double y = (minIloc->y * *minIscore + minJloc->y * *minJscore) /
(*minIscore + *minJscore);
//put into the first
minIloc->x = (int)x;// ((minJloc->x + minJloc->x)/2.0); // (int) x;
minIloc->y = (int)y;// ((minJloc->y + minIloc->y)/2.0); // (int) y;
*minIscore = (*minJscore + *minIscore)/2;///2;
//delete second one
maxLineLocs.erase(minJloc);
maxLineScores.erase(minJscore);
//check if to put somewhere else depending on the changed score
for (iscore=maxLineScores.begin(), iloc=maxLineLocs.begin();
iscore!=maxLineScores.end() && *minIscore <= *iscore;
iscore++, iloc++);
//swap the original location if different
if (iscore!=minIscore )
{
//insert in new position
maxLineScores.insert(iscore, *minIscore);
maxLineLocs.insert(iloc, *minIloc);
//delte old
maxLineScores.erase(minIscore);
maxLineLocs.erase(minIloc);
}
}
}
}
检测直线输出,以线段端点形式:
//process detected maxima and return detected line(s)
for(int i=0; i<int(maxLineScores.size()); i++)
{
//check if above threshold
if (maxLineScores[i]>=detectionThreshold)
{
//get sub-pixel accuracy
//
//get the two end points from the r-theta
Line line;
assert(maxLineLocs[i].x>=0 && maxLineLocs[i].x<thetaBins);
assert(maxLineLocs[i].y>=0 && maxLineLocs[i].y<rBins);
mcvIntersectLineRThetaWithBB(rs[maxLineLocs[i].y],
thetas[maxLineLocs[i].x],
cvSize(image->cols, image->rows), &line);
//get line extent
//put the extracted line
lines->push_back(line);
if (lineScores)
(*lineScores).push_back(maxLineScores[i]);
}
//not above threshold
else
{
//exit out of the for loop, as the scores are sorted descendingly
break;
}
}
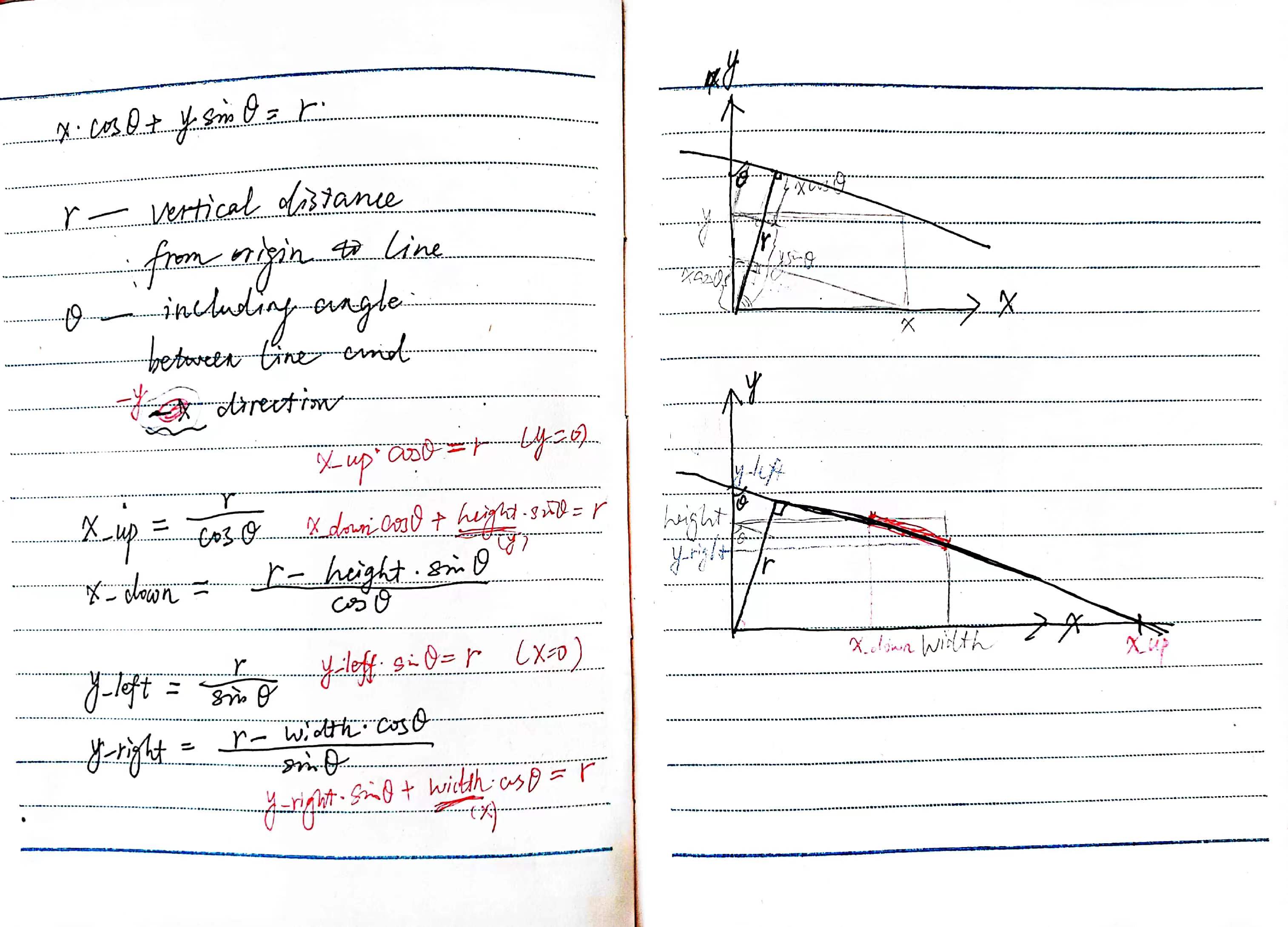
mcvIntersectLineRThetaWithBB函数实现:
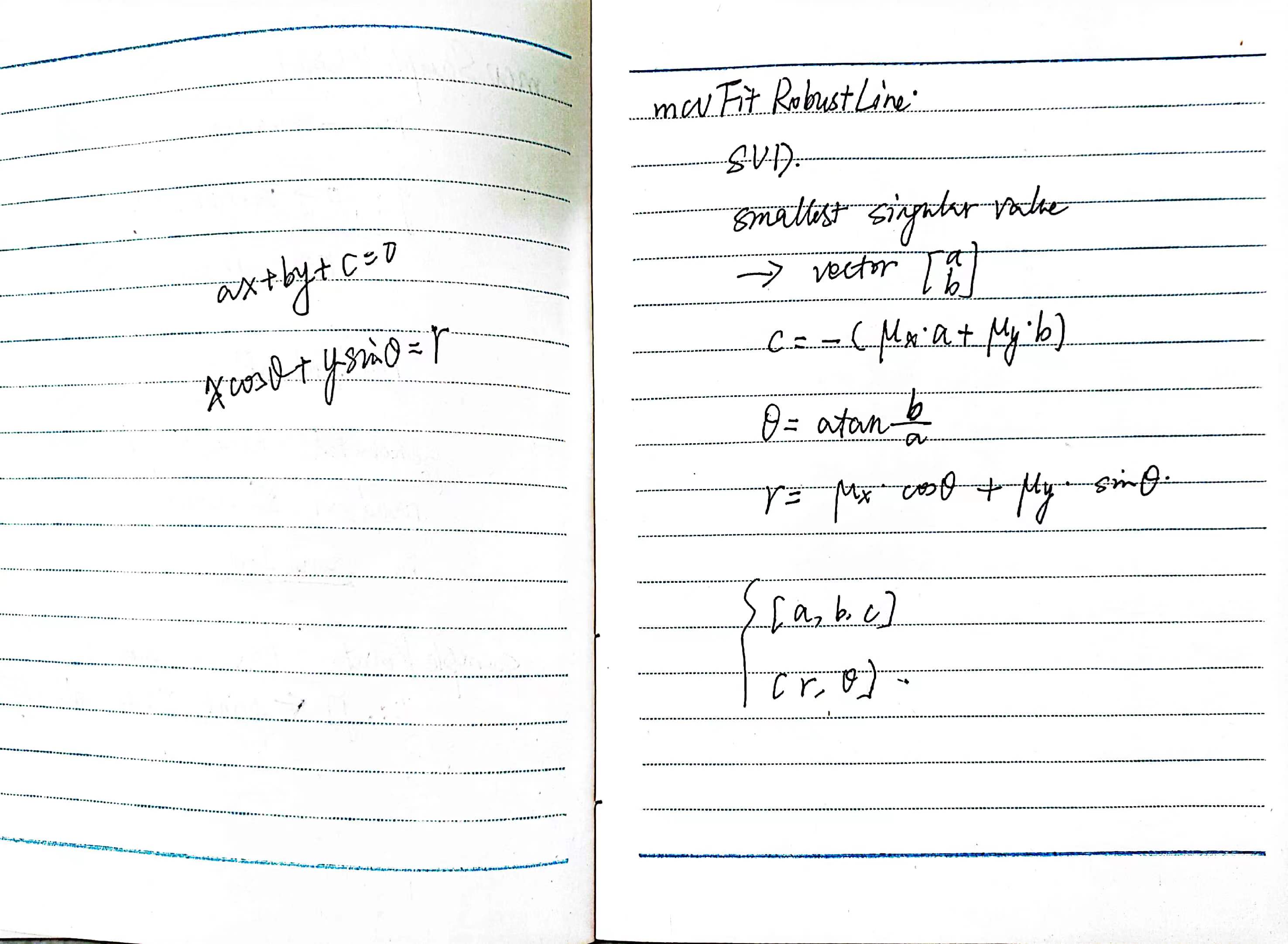
/** This function intersects the input line (given in r and theta) with
* the given bounding box where the line is represented by:
* x cos(theta) + y sin(theta) = r
*
* \param r the r value for the input line
* \param theta the theta value for the input line
* \param bbox the bounding box
* \param outLine the output line
*
*/
void mcvIntersectLineRThetaWithBB(FLOAT r, FLOAT theta, const CvSize bbox,
Line *outLine)
{
//hold parameters
double xup, xdown, yleft, yright;
//intersect with top and bottom borders: y=0 and y=bbox.height-1
if (cos(theta)==0) //horizontal line
{
xup = xdown = bbox.width+2;
}
else
{
xup = r / cos(theta);
xdown = (r-bbox.height*sin(theta))/cos(theta);
}
//intersect with left and right borders: x=0 and x=bbox.widht-1
if (sin(theta)==0) //horizontal line
{
yleft = yright = bbox.height+2;
}
else
{
yleft = r/sin(theta);
yright = (r-bbox.width*cos(theta))/sin(theta);
}
//points of intersection
FLOAT_POINT2D pts[4] = { {xup, 0}, {xdown,bbox.height},
{0, yleft},{bbox.width, yright}};
//get the starting point
int i;
for (i=0; i<4; i++)
{
//if point inside, then put it
if(mcvIsPointInside(pts[i], bbox))
{
outLine->startPoint.x = pts[i].x;
outLine->startPoint.y = pts[i].y;
//get out of for loop
break;
}
}
//get the ending point
for (i++; i<4; i++)
{
//if point inside, then put it
if(mcvIsPointInside(pts[i], bbox))
{
outLine->endPoint.x = pts[i].x;
outLine->endPoint.y = pts[i].y;
//get out of for loop
break;
}
}
}
相关几何理解:
对Hough聚类输出的直线进行融合,以及边界框的计算:
int width = image->width-1;
int height = image->height-1;
//try grouping the lines into regions
//float groupThreshold = 15;
mcvGroupLines(lines, lineScores, lineConf->groupThreshold,
cvSize(width, height));
//group bounding boxes of lines
float overlapThreshold = lineConf->overlapThreshold; //0.5; //.8;
vector<CvRect> boxes;
mcvGetLinesBoundingBoxes(lines, lineType, cvSize(width, height),
boxes);
mcvGroupBoundingBoxes(boxes, lineType, overlapThreshold);
mcvGroupLines函数实现:
/** This function groups nearby lines
*
* \param lines vector of lines
* \param lineScores scores of input lines
* \param groupThreshold the threshold used for grouping
* \param bbox the bounding box to intersect with
*/
void mcvGroupLines(vector<Line> &lines, vector<float> &lineScores,
float groupThreshold, CvSize bbox)
{
//convert the lines into r-theta parameters
int numInLines = lines.size();
vector<float> rs(numInLines);
vector<float> thetas(numInLines);
for (int i=0; i<numInLines; i++)
mcvLineXY2RTheta(lines[i], rs[i], thetas[i]);
//flag for stopping
bool stop = false;
while (!stop)
{
//minimum distance so far
float minDist = groupThreshold+5, dist;
vector<float>::iterator ir, jr, itheta, jtheta, minIr, minJr, minItheta, minJtheta,
iscore, jscore, minIscore, minJscore;
//compute pairwise distance between detected maxima
for (ir=rs.begin(), itheta=thetas.begin(), iscore=lineScores.begin();
ir!=rs.end(); ir++, itheta++, iscore++)
for (jr=ir+1, jtheta=itheta+1, jscore=iscore+1;
jr!=rs.end(); jr++, jtheta++, jscore++)
{
//add pi if neg
float t1 = *itheta<0 ? *itheta : *itheta+CV_PI;
float t2 = *jtheta<0 ? *jtheta : *jtheta+CV_PI;
//get distance
dist = 1 * fabs(*ir - *jr) + 1 * fabs(t1 - t2);//fabs(*itheta - *jtheta);
//check if minimum
if (dist<minDist)
{
minDist = dist;
minIr = ir; minItheta = itheta;
minJr = jr; minJtheta = jtheta;
minIscore = iscore; minJscore = jscore;
}
}
//check if minimum distance is less than groupThreshold
if (minDist >= groupThreshold)
stop = true;
else
{
//put into the first
*minIr = (*minIr + *minJr)/2;
*minItheta = (*minItheta + *minJtheta)/2;
*minIscore = (*minIscore + *minJscore)/2;
//delete second one
rs.erase(minJr);
thetas.erase(minJtheta);
lineScores.erase(minJscore);
}
}//while
//put back the lines
lines.clear();
//lines.resize(rs.size());
vector<float> newScores=lineScores;
lineScores.clear();
for (int i=0; i<(int)rs.size(); i++)
{
//get the line
Line line;
mcvIntersectLineRThetaWithBB(rs[i], thetas[i], bbox, &line);
//put in place descendingly
vector<float>::iterator iscore;
vector<Line>::iterator iline;
for (iscore=lineScores.begin(), iline=lines.begin();
iscore!=lineScores.end() && newScores[i]<=*iscore; iscore++, iline++);
lineScores.insert(iscore, newScores[i]);
lines.insert(iline, line);
}
//clear
newScores.clear();
}
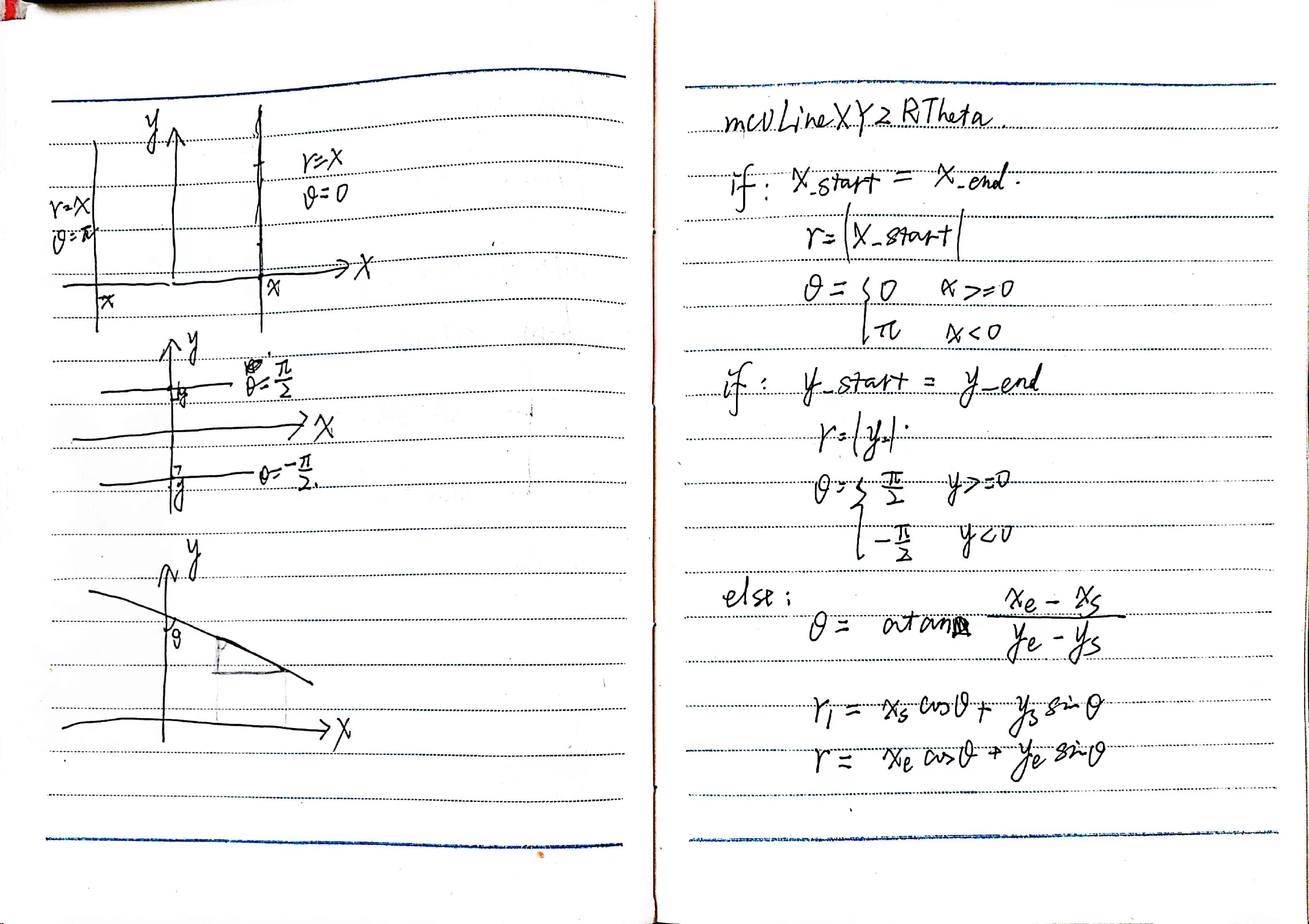
mcvLineXY2RTheta函数实现:
/** This functions converts a line defined by its two end-points into its
* r and theta (origin is at top-left corner with x right and y down and
* theta measured positive clockwise(with y pointing down) -pi < theta < pi )
*
* \param line input line
* \param r the returned r (normal distance to the line from the origin)
* \param outLine the output line
*
*/
void mcvLineXY2RTheta(const Line &line, float &r, float &theta)
{
//check if vertical line x1==x2
if(line.startPoint.x == line.endPoint.x)
{
//r is the x
r = fabs(line.startPoint.x);
//theta is 0 or pi
theta = line.startPoint.x>=0 ? 0. : CV_PI;
}
//check if horizontal i.e. y1==y2
else if(line.startPoint.y == line.endPoint.y)
{
//r is the y
r = fabs(line.startPoint.y);
//theta is pi/2 or -pi/2
theta = (float) line.startPoint.y>=0 ? CV_PI/2 : -CV_PI/2;
}
//general line
else
{
//tan(theta) = (x2-x1)/(y1-y2)
theta = atan2(line.endPoint.x-line.startPoint.x,
line.startPoint.y-line.endPoint.y);
//r = x*cos(theta)+y*sin(theta)
float r1 = line.startPoint.x * cos(theta) + line.startPoint.y * sin(theta);
r = line.endPoint.x * cos(theta) + line.endPoint.y * sin(theta);
//adjust to add pi if necessary
if(r1<0 || r<0)
{
//add pi
theta += CV_PI;
if(theta>CV_PI)
theta -= 2*CV_PI;
//take abs
r = fabs(r);
}
}
}
mcvLineXY2RTheta函数几何理解:
对于Hough聚类中每一条候选直线上的像素点,使用RANSAC算法对直线参数进行拟合,输出参数形式为\((r,\theta)\):
/** This functions implements RANSAC algorithm for line fitting
* given an image
*
*
* \param image input image
* \param numSamples number of samples to take every iteration
* \param numIterations number of iterations to run
* \param threshold threshold to use to assess a point as a good fit to a line
* \param numGoodFit number of points close enough to say there's a good fit
* \param getEndPoints whether to get the end points of the line from the data,
* just intersect with the image boundaries
* \param lineType the type of line to look for (affects getEndPoints)
* \param lineXY the fitted line
* \param lineRTheta the fitted line [r; theta]
* \param lineScore the score of the line detected
*
*/
void mcvFitRansacLine(const CvMat *image, int numSamples, int numIterations,
float threshold, float scoreThreshold, int numGoodFit,
bool getEndPoints, LineType lineType,
Line *lineXY, float *lineRTheta, float *lineScore)
{
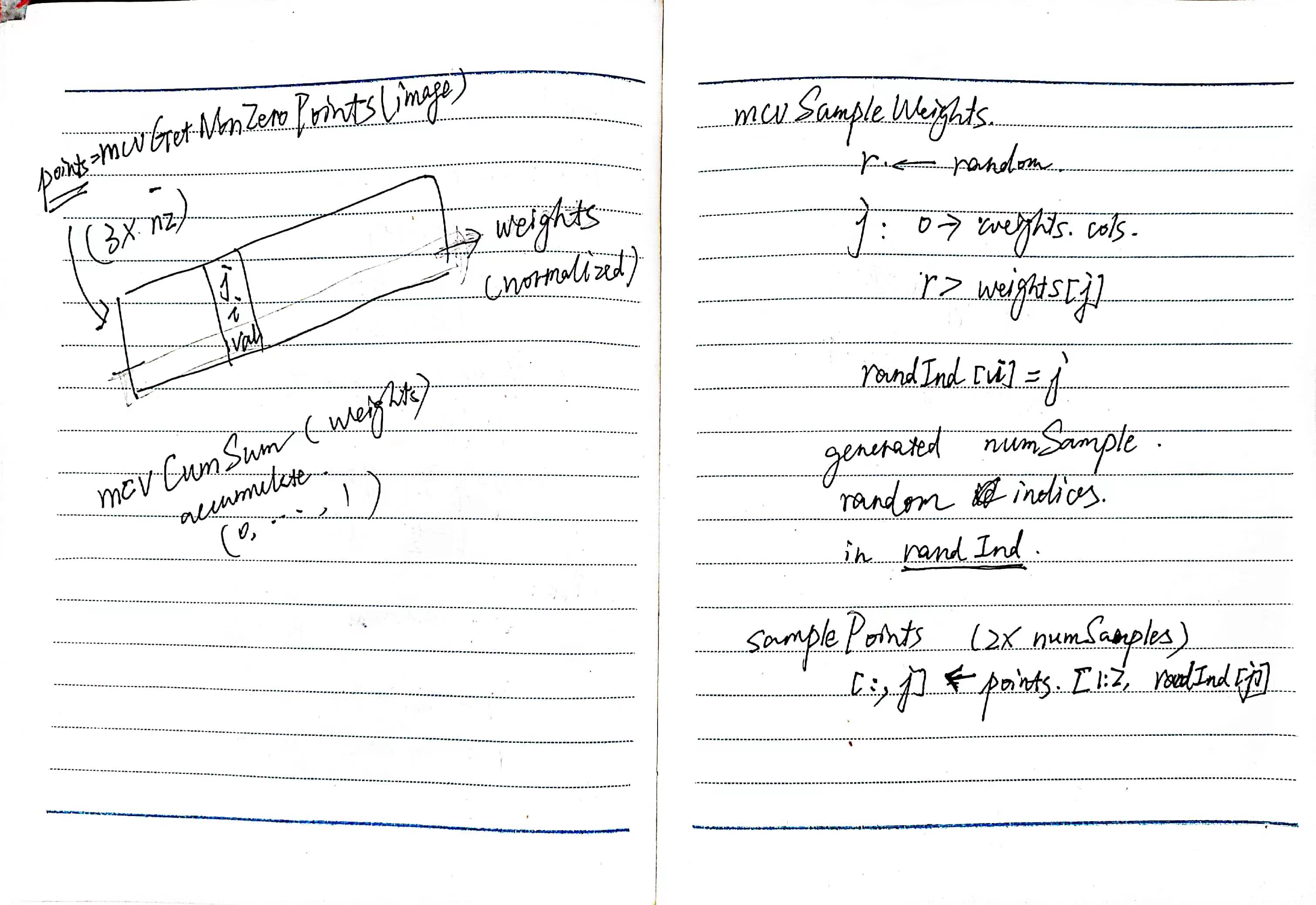
//get the points with non-zero pixels
CvMat *points;
points = mcvGetNonZeroPoints(image,true);
if (!points)
return;
//check numSamples
if (numSamples>points->cols)
numSamples = points->cols;
//subtract half
cvAddS(points, cvRealScalar(0.5), points);
//normalize pixels values to get weights of each non-zero point
//get third row of points containing the pixel values
CvMat w;
cvGetRow(points, &w, 2);
//normalize it
CvMat *weights = cvCloneMat(&w);
cvNormalize(weights, weights, 1, 0, CV_L1);
//get cumulative sum
mcvCumSum(weights, weights);
//random number generator
CvRNG rng = cvRNG(0xffffffff);
//matrix to hold random sample
CvMat *randInd = cvCreateMat(numSamples, 1, CV_32SC1);
CvMat *samplePoints = cvCreateMat(2, numSamples, CV_32FC1);
//flag for points currently included in the set
CvMat *pointIn = cvCreateMat(1, points->cols, CV_8SC1);
//returned lines
float curLineRTheta[2], curLineAbc[3];
float bestLineRTheta[2]={-1.f,0.f}, bestLineAbc[3];
float bestScore=0, bestDist=1e5;
float dist, score;
Line curEndPointLine={ {-1.,-1.},{-1.,-1.}},
bestEndPointLine={ {-1.,-1.},{-1.,-1.}};
//variabels for getting endpoints
//int mini, maxi;
float minc=1e5f, maxc=-1e5f, mind, maxd;
float x, y, c=0.;
CvPoint2D32f minp={-1., -1.}, maxp={-1., -1.};
//outer loop
for (int i=0; i<numIterations; i++)
{
//set flag to zero
//cvSet(pointIn, cvRealScalar(0));
cvSetZero(pointIn);
//get random sample from the points
#warning "Using weighted sampling for Ransac Line"
// cvRandArr(&rng, randInd, CV_RAND_UNI, cvRealScalar(0), cvRealScalar(points->cols));
mcvSampleWeighted(weights, numSamples, randInd, &rng);
for (int j=0; j<numSamples; j++)
{
//flag it as included
CV_MAT_ELEM(*pointIn, char, 0, CV_MAT_ELEM(*randInd, int, j, 0)) = 1;
//put point
CV_MAT_ELEM(*samplePoints, float, 0, j) =
CV_MAT_ELEM(*points, float, 0, CV_MAT_ELEM(*randInd, int, j, 0));
CV_MAT_ELEM(*samplePoints, float, 1, j) =
CV_MAT_ELEM(*points, float, 1, CV_MAT_ELEM(*randInd, int, j, 0));
}
//fit the line
mcvFitRobustLine(samplePoints, curLineRTheta, curLineAbc);
//get end points from points in the samplePoints
minc = 1e5; mind = 1e5; maxc = -1e5; maxd = -1e5;
for (int j=0; getEndPoints && j<numSamples; ++j)
{
//get x & y
x = CV_MAT_ELEM(*samplePoints, float, 0, j);
y = CV_MAT_ELEM(*samplePoints, float, 1, j);
//get the coordinate to work on
if (lineType == LINE_HORIZONTAL)
c = x;
else if (lineType == LINE_VERTICAL)
c = y;
//compare
if (c>maxc)
{
maxc = c;
maxp = cvPoint2D32f(x, y);
}
if (c<minc)
{
minc = c;
minp = cvPoint2D32f(x, y);
}
} //for
// fprintf(stderr, "\nminx=%f, miny=%f\n", minp.x, minp.y);
// fprintf(stderr, "maxp=%f, maxy=%f\n", maxp.x, maxp.y);
//loop on other points and compute distance to the line
score=0;
for (int j=0; j<points->cols; j++)
{
// //if not already inside
// if (!CV_MAT_ELEM(*pointIn, char, 0, j))
// {
//compute distance to line
dist = fabs(CV_MAT_ELEM(*points, float, 0, j) * curLineAbc[0] +
CV_MAT_ELEM(*points, float, 1, j) * curLineAbc[1] + curLineAbc[2]);
//check distance
if (dist<=threshold)
{
//add this point
CV_MAT_ELEM(*pointIn, char, 0, j) = 1;
//update score
score += cvGetReal2D(image, (int)(CV_MAT_ELEM(*points, float, 1, j)-.5),
(int)(CV_MAT_ELEM(*points, float, 0, j)-.5));
}
// }
}
//check the number of close points and whether to consider this a good fit
int numClose = cvCountNonZero(pointIn);
//cout << "numClose=" << numClose << "\n";
if (numClose >= numGoodFit)
{
//get the points included to fit this line
CvMat *fitPoints = cvCreateMat(2, numClose, CV_32FC1);
int k=0;
//loop on points and copy points included
for (int j=0; j<points->cols; j++)
if(CV_MAT_ELEM(*pointIn, char, 0, j))
{
CV_MAT_ELEM(*fitPoints, float, 0, k) =
CV_MAT_ELEM(*points, float, 0, j);
CV_MAT_ELEM(*fitPoints, float, 1, k) =
CV_MAT_ELEM(*points, float, 1, j);
k++;
}
//fit the line
mcvFitRobustLine(fitPoints, curLineRTheta, curLineAbc);
//compute distances to new line
dist = 0.;
for (int j=0; j<fitPoints->cols; j++)
{
//compute distance to line
x = CV_MAT_ELEM(*fitPoints, float, 0, j);
y = CV_MAT_ELEM(*fitPoints, float, 1, j);
float d = fabs( x * curLineAbc[0] +
y * curLineAbc[1] +
curLineAbc[2])
* cvGetReal2D(image, (int)(y-.5), (int)(x-.5));
dist += d;
}
//now check if we are getting the end points
if (getEndPoints)
{
//get distances
mind = minp.x * curLineAbc[0] +
minp.y * curLineAbc[1] + curLineAbc[2];
maxd = maxp.x * curLineAbc[0] +
maxp.y * curLineAbc[1] + curLineAbc[2];
//we have the index of min and max points, and
//their distance, so just get them and compute
//the end points
curEndPointLine.startPoint.x = minp.x
- mind * curLineAbc[0];
curEndPointLine.startPoint.y = minp.y
- mind * curLineAbc[1];
curEndPointLine.endPoint.x = maxp.x
- maxd * curLineAbc[0];
curEndPointLine.endPoint.y = maxp.y
- maxd * curLineAbc[1];
// SHOW_MAT(fitPoints, "fitPoints");
// SHOW_LINE(curEndPointLine, "line");
}
//dist /= score;
//clear fitPoints
cvReleaseMat(&fitPoints);
//check if to keep the line as best
if (score>=scoreThreshold && score>bestScore)//dist<bestDist //(numClose > bestScore)
{
//update max
bestScore = score; //numClose;
bestDist = dist;
//copy
bestLineRTheta[0] = curLineRTheta[0];
bestLineRTheta[1] = curLineRTheta[1];
bestLineAbc[0] = curLineAbc[0];
bestLineAbc[1] = curLineAbc[1];
bestLineAbc[2] = curLineAbc[2];
bestEndPointLine = curEndPointLine;
}
} // if numClose
//debug
if (DEBUG_LINES) {//#ifdef DEBUG_GET_STOP_LINES
char str[256];
//convert image to rgb
CvMat* im = cvCloneMat(image);
mcvScaleMat(image, im);
CvMat *imageClr = cvCreateMat(image->rows, image->cols, CV_32FC3);
cvCvtColor(im, imageClr, CV_GRAY2RGB);
Line line;
//draw current line if there
if (curLineRTheta[0]>0)
{
mcvIntersectLineRThetaWithBB(curLineRTheta[0], curLineRTheta[1],
cvSize(image->cols, image->rows), &line);
mcvDrawLine(imageClr, line, CV_RGB(1,0,0), 1);
if (getEndPoints)
mcvDrawLine(imageClr, curEndPointLine, CV_RGB(0,1,0), 1);
}
//draw best line
if (bestLineRTheta[0]>0)
{
mcvIntersectLineRThetaWithBB(bestLineRTheta[0], bestLineRTheta[1],
cvSize(image->cols, image->rows), &line);
mcvDrawLine(imageClr, line, CV_RGB(0,0,1), 1);
if (getEndPoints)
mcvDrawLine(imageClr, bestEndPointLine, CV_RGB(1,1,0), 1);
}
sprintf(str, "scor=%.2f, best=%.2f", score, bestScore);
mcvDrawText(imageClr, str, cvPoint(30, 30), .25, CV_RGB(255,255,255));
SHOW_IMAGE(imageClr, "Fit Ransac Line", 10);
//clear
cvReleaseMat(&im);
cvReleaseMat(&imageClr);
}//#endif
} // for i
//return
if (lineRTheta)
{
lineRTheta[0] = bestLineRTheta[0];
lineRTheta[1] = bestLineRTheta[1];
}
if (lineXY)
{
if (getEndPoints)
*lineXY = bestEndPointLine;
else
mcvIntersectLineRThetaWithBB(lineRTheta[0], lineRTheta[1],
cvSize(image->cols-1, image->rows-1),
lineXY);
}
if (lineScore)
*lineScore = bestScore;
//clear
cvReleaseMat(&points);
cvReleaseMat(&samplePoints);
cvReleaseMat(&randInd);
cvReleaseMat(&pointIn);
}