ROS节点内存泄漏问题调试
Published:
ROS节点内存泄漏问题调试.
data_pretreat_node节点内存泄漏问题
内存泄漏原因
原代码VisionData析构函数中if (!image) delete image;没有达到释放内存的目的,即VisionData中new的内存在程序运行期间一直没有释放,导致内存泄漏。
// sensor_date/vision_data.hpp
class VisionData
{
public:
VisionData()
{
image = new uchar[channel * width * height]();
}
~VisionData()
{
if (!image) delete image;
}
public:
double time = 0.0;
double seq = 0;
int width = 600;
int height = 600;
int channel = 3;
uchar *image;
};
代码修改
VisionData析构函数修改如下。
不在析构函数中进行image指针的内存释放,这样可以减少后面大量的内存拷贝操作,提高运行效率。
// sensor_date/vision_data.hpp
class VisionData
{
public:
VisionData()
{
image = new uchar[channel * width * height]();
}
~VisionData()
{
// if (!image) delete image;
}
void clear()
{
delete[] image;
}
public:
double time = 0.0;
double seq = 0;
int width = 600;
int height = 600;
int channel = 3;
uchar *image;
};
修改VisionSubscriber::msg_callback函数如下(第7行与第25行)。
临时变量在析构时会调用delete,释放指针image所指向的内存,当通过push_back将指针复制到new_vision_data_中,指针image将指向无效内存。
因此直接在new_vision_data_中进行VisionData的构造,再对其末尾元素进行引用,这样不会改变指针所指向的存在空间,在对new_vision_data_进行clear等操作时,也可以对内存进行有效释放。
若不在析构函数中进行内存释放,则不会出现上述问题,使用临时变量对指针进行拷贝的操作也是可行的。
// subscriber/vision_subscriber.cpp
void VisionSubscriber::msg_callback(const sensor_msgs::ImageConstPtr &msg_ptr)
{
buff_mutex_.lock();
// VisionData avm_img;
new_vision_data_.resize(new_vision_data_.size()+1);
VisionData& avm_img=new_vision_data_.back();
avm_img.time = msg_ptr->header.stamp.toSec() + delay_time_to_ins_;
avm_img.seq = msg_ptr->header.seq;
cv_bridge::CvImageConstPtr cv_ptr;
try {
cv_ptr = cv_bridge::toCvCopy(msg_ptr, sensor_msgs::image_encodings::BGR8);
} catch (cv_bridge::Exception &ex) {
ROS_ERROR("cv_bridge exception in rgbcallback: %s", ex.what());
exit(-1);
}
...
memcpy(avm_img.image, cv_ptr->image.data, sizeof(uchar) * avm_img.channel * avm_img.width * avm_img.height);
// new_vision_data_.push_back(avm_img);
buff_mutex_.unlock();
}
data_pretreat_flow.cpp中的相关代码修改如下。
在删除vision_data_buff_队列前面的数据时,需要对内存进行释放,因此调用clear函数。
第28行将vision_data_buff_最前面的元素拷贝给current_vision_data_时,需要对current_vision_data_原有数据指针指向的内存进行释放。
// data_pretreat/data_pretreat_flow.cpp
bool DataPretreatFlow::ReadData()
{
...
if (start_ins_time > vision_time) {
vision_data_buff_.front().clear();
vision_data_buff_.pop_front();
return false;
}
...
if (!sensor_inited) {
if (!valid_ins) {
vision_data_buff_.front().clear();
vision_data_buff_.pop_front();
return false;
}
...
}
return true;
}
bool DataPretreatFlow::ValidData()
{
current_vision_data_.clear();
current_vision_data_ = vision_data_buff_.front();
...
if (diff_ins_time < -0.05) {
vision_data_buff_.front().clear();
vision_data_buff_.pop_front();
return false;
}
...
vision_data_buff_.pop_front();
ins_data_buff_.pop_front();
return true;
}
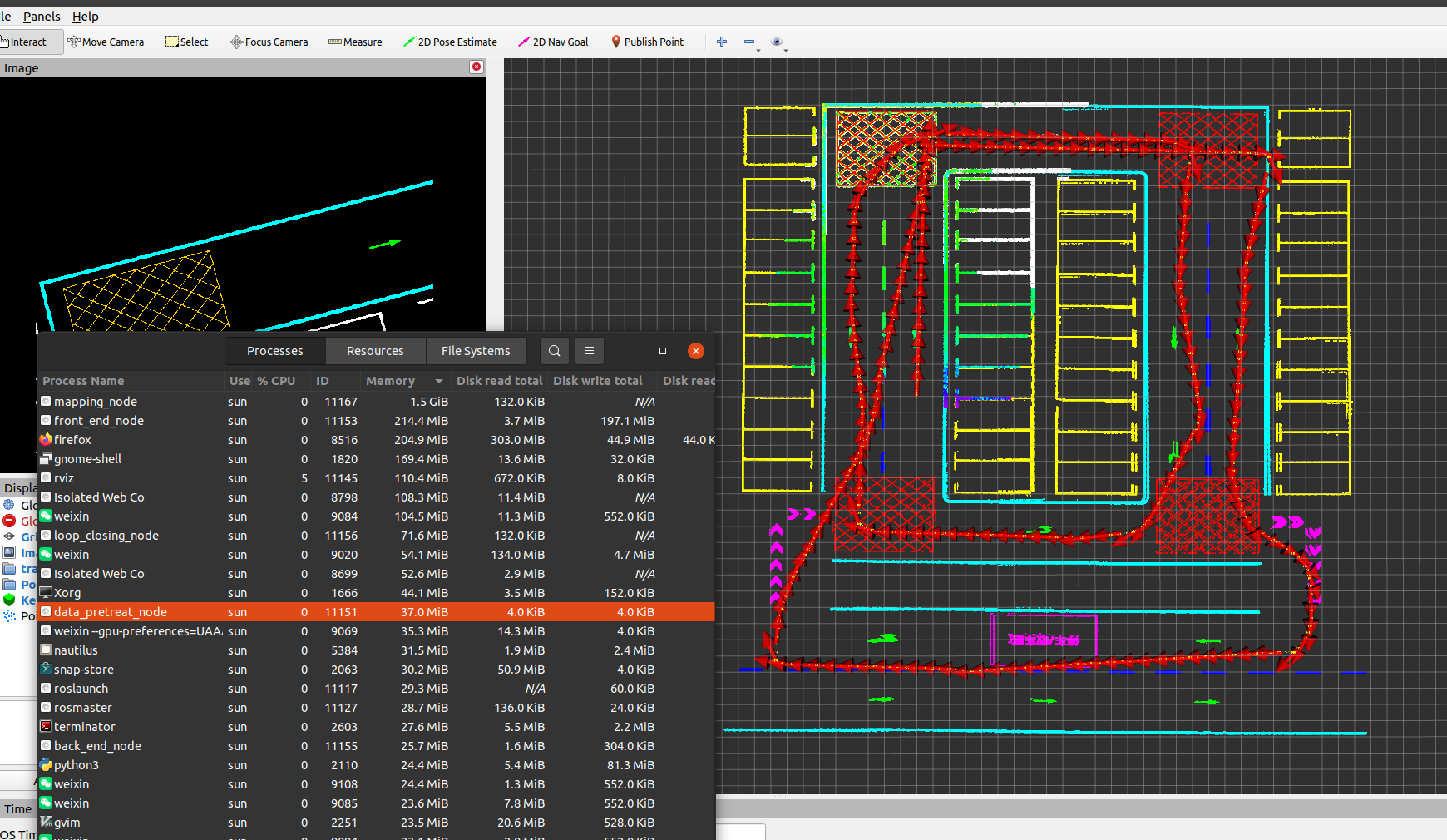
问题解决
修改后内存泄漏问题解决,如下图所示。